PursuitMFD ドッキングを自動化・補助する
PursuitMFDのDockingモードによる自動ドッキングについて解説します。
ドッキングポートの前方で待機する
PursuitMFDを使えば、ドッキングポートの軸線上に宇宙船を待機させることができる。
あらかじめターゲットとランデブーして、ドッキングポートが見える位置に移動しておく。
ターゲットを指定する
PursuitMFDを開いて、DOCをクリックしてDockingモードにする。
TGTをクリックして、ターゲットの名前(ISSなど)を入力してEnterを押す。
TDKをクリックして1と入力してEnterを押す。
TGTでターゲット、TDKで使用するドッキングポート(相手側)を指定する。
LDKで自機のドッキングポートを指定する。
ドッキングポートまでの距離を指定する
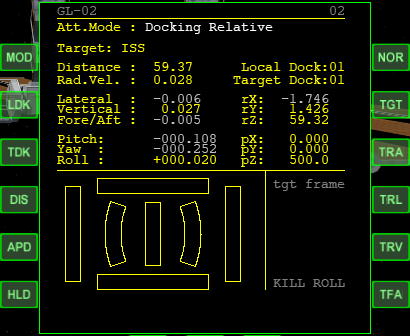
NORを何度かクリックして、ロール軸の制御を有効にする。
| KILL ROLL | ロール軸の回転を止める |
| NO ROLL | ロール軸の制御を無効にする |
| ロール軸の制御が有効 |
DISをクリック。0 0 50と入力してEnterを押す。
APDをクリックしてオートパイロットを開始する。
自機のドッキングポートを目標のドッキングポートに指向しつつ、ポートの前方50mに自動で移動する。
DISボタンではドッキングポートまでの距離を指定することができる。
X軸、Y軸、Z軸の順番で、半角スペースをあいだに入れて入力する。
自動でドッキングする
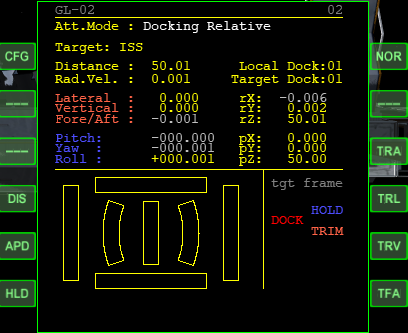
DISをクリックして、0 0 -0.1と入力してEnterを押す。
すでにオートパイロットを実行中ならそのまま、まだオートパイロットを実行していない場合はAPDをクリック。
全自動でドッキングされる。
ドッキングが終了すると、オートパイロットは自動で解除される。
ドッキングを補助する
HLDで機体の向き、TRAでドッキングポートまでの距離をそれぞれ制御する。
TRLでX軸(左右)、TRVでY軸(上下)、TFAでZ軸(前後)の距離だけを制御する。
HLD、TRL、TRVの3つだけを有効にすると、ドッキング時の速度を手動でコントロールできる。