ISS A to Zの操作
これら以外にも、操作可能なモジュールはいくつかあるので探してみてください。
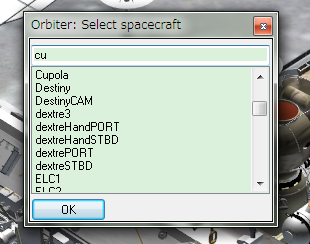
モジュールの選択
ISS A to Zは、複数のモジュールの集合体であり、それぞれの機能を使うためには特定のモジュールを選択する必要がある。
F3キーを押して、使いたい機能に対応したモジュールを選択する。
キー入力で検索することも可能。
MFDでISS A to Zそれ自体をターゲットする場合は、CMGなどの特定のモジュールを選択すること。
ISSという名前ではターゲットできない。
モジュールの操作
ISS A to ZはSpacecraft3.dllをベースに作られており、使用可能なキーはSpacecraft3のそれとほぼ同じ。
Spacecraft.dll キー操作一覧
重要:テンキーを使用する場合は、あらかじめNumLockを解除しておくこと。
CMG(姿勢制御ジャイロ)
ISSは通常、地球に同じ面を向けて回転しているが、ドッキングなどの必要に応じてこれを停止させることができる。
| 3 | Attitude keeping(姿勢制御)のオン・オフ |
| G | Zero Angular(角速度ゼロ=回転を完全に止める)のオン・オフ |
| K | Free drift(姿勢制御をオフにする) |
| 2or8 テンキー |
ピッチ角を変更 |
| 1or3 テンキー |
ヨー角を変更 |
| 4or6 テンキー |
ロール角を変更 |
| Ctrl+1 | ピッチ角を設定 |
| Ctrl+2 | ヨー角を設定 |
| Ctrl+3 | ロール角を設定 |
| Ctrl+4 | 回転速度を設定 [°/s] |
太陽の反射光でHUDの表示が見づらいときは、右ドラッグでカメラの向きを変更する。
SSRMSD(ロボットアーム)
Orbiter2016の場合は以下のページを参照。
Canadarm2の操作
| SPACE | ロボットアームの起動 |
| 左Shift + テンキー4or6 | アームの関節を選択 |
| 左Shift + テンキー2or8 | 関節を曲げる |
| 左Shift + テンキー0 | ペイロードの固定・切り離し |
以下の項目で説明するいくつかのモジュールも、ロボットアームと同じキー操作になっている。
- スペースキーを押して、使用可能な状態にする。
- 左Shift + テンキー4or6で操作したい部分を選択。
- 左Shift + テンキー2or8で動かす。
MTS
ロボットアームを接続して、ISSのトラスを移動することができる台車。
操作はロボットアームと同じ。
Harmony(ハーモニーモジュール)
エアロックのThermal cover(熱管理のためのカバー)を開閉する。
操作はロボットアームと同じ。
Cupola(キューポラ)
| F8 | 3Dコクピットを使う(HUDを無効にする) |
| 左Shift+K | Map MFDをTRKモードにする |
| 左Shift + テンキー1~7 | シャッターを開閉する |
| 左Shift + 左Ctrl + テンキー7 | 天窓のシャッターを閉じる |
キューポラ内のキーボードなどは使えないが、GlassCockpitというMODを導入すれば左右のMFDを操作することができる。
GlassCockpit
v1.2
JEM(きぼう)
| GorK | エアロックの開閉 |
| 左Shift + テンキー1 | 窓の開閉 |
エアロック内のサイドテーブルはロボットアーム扱いになっており、実際に使用することはできないが動かすことができる。
JEMRMS(きぼうロボットアーム)
操作はロボットアーム(SSRMSD)と同じ。
実際に使用することはできないが動かすことができる。