Canadarm2の操作
Canadarm2MODの操作方法について説明します。
アームを起動する
F3キーを押してSSRMSDを選択する。
Ctrl+Spaceで操作ダイアログを呼び出す。
操作ダイアログを出したままにしておけば、ほかの宇宙船を選択した状態でも使用できる。
アームを操作する
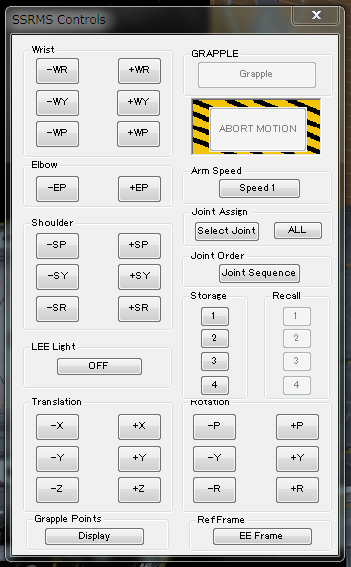
左上のボタンをクリックすると、それぞれの関節を操作できる。
| Wrist | 手首 |
|---|---|
| Elbow | ひじ |
| Shoulder | 肩 |
| R | ロール |
| Y | ヨー |
| P | ピッチ |
Arm Speedでアームの移動速度を変更する。
また、RCSと同じテンキー操作で、アームを平行移動させたり、向きを変えることができる。
RCS LINなら平行移動、RCS ROTなら先端がその場で回転する。
ただし、関節の可動域の制約があるので、ロックした場合は各関節を個別に動かす必要がある。
ペイロードに接続する
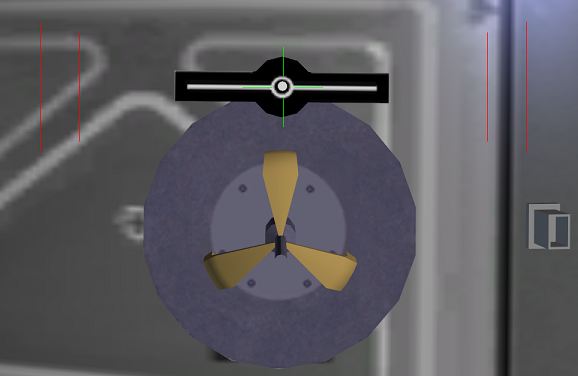
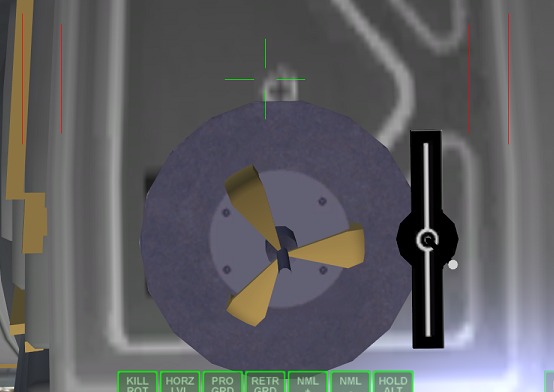
カメラの位置をペイロードの目印に合わせて、アームの先端を密着させる。
Grappleボタンをクリック。
ISS v3.2では、アームの取り付け位置が左に90°ずれている。
Canadarm2はISS v3.2向けに作られたわけではないので、取り付け位置にずれが生じている。
ISS A to Z、こうのとり、ドラゴン宇宙船などのMODでは、目印の通りに接続できる。
スペースシャトルのペイロードに接続する
スペースシャトルに搭載されたペイロードに接続する場合、手順は以下の通り。
- F3キーを押してShuttleBayを選択。
- Ctrl+Aを押してAttachment managerを起動。
- Dを押してペイロードを選択。
- Qを押してペイロードを切り離す。
あらかじめペイロードを切り離しておかないと、Grappleボタンを押しても接続されない。
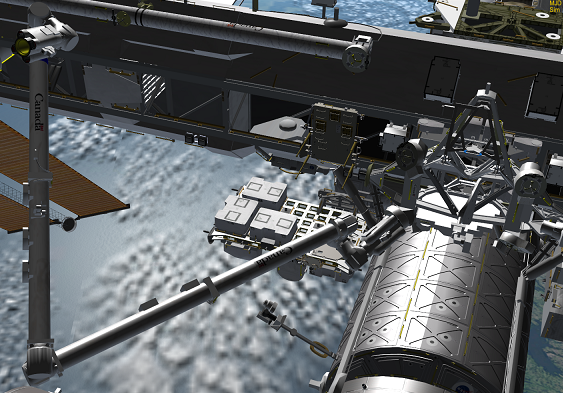
ステーション上を移動させる
現実のカナダアーム2と同じく、ISSの上をしゃくとり虫のように移動できる。
PDGFを探す
ダイアログボックスでGrapple Pointsのボタンをクリック。
取り付け位置を示す矢印を表示させる。
青い矢印が表示されている PDGF(アームの取り付け位置)を探す。
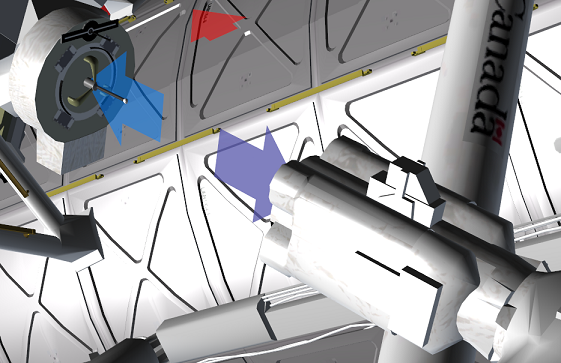
アームを接続する
アームの先端を接触させてGrappleボタンをクリック。
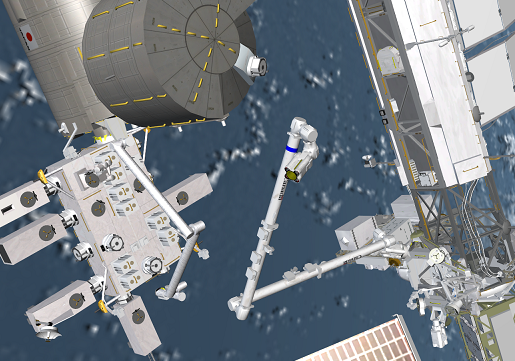
先端・根元の切り替え
PDGFと接触した状態でCtrlキーを押しながらAを押す。
アームの先端と根元が入れ替わる。
青い矢印のPDGFを探して接続することで、好きな場所に移動できる。
International Space Station v3.2や ISS A to Zでは、MBSに接続して移動することもできる。
キー操作一覧
Ctrlとの同時押しで、逆方向に回転する。
| S | アームの移動速度を変える |
| 1 | 肩ロール角を変更 |
| 2 | 肩ヨー角を変更 |
| 3 | 肩ピッチ角を変更 |
| 4 | ひじピッチ角を変更 |
| 5 | 手首ピッチ角を変更 |
| 6 | 手首ヨー角を変更 |
| 7 | 手首ロール角を変更 |
| Ctrl+F | 平行移動の基準となる平面を変更 |
| 矢印キー | Y-Z平面を移動(RCS ROTのみ) |
| DeleteorInsert | X軸方向に移動(RCS ROTのみ) |
| テンキー | アームの先端を移動・回転させる RCSと同じ操作 |