ISS v3.2 カナダアーム2とMBSの操作
ISS v3.2では、カナダアーム2(SSRMS)を使ったISSの組み立てミッションも体験できます。
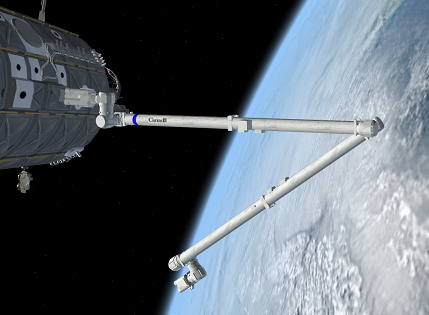
SSRMSの操作
機能としてはスペースシャトルのRMSと違いはないのですが、操作方法がまったく違うので注意してください。
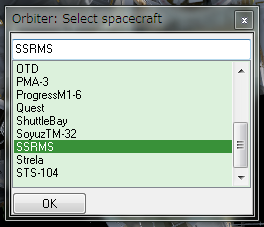
F3キーを押して、SSRMSを選択してOKをクリック。
| 1-7 | アームの関節をそれぞれ操作する |
| S | 関節の回転の向きを変える |
| Q | ペイロードの取り付け/切り離し (F3キーでSSRMSを選択してから操作する) |
| M | ISSからSSRMSを遠隔操作する |
| SHIFT+S | ISSからの遠隔操作モードで、関節の回転の向きを変える |
ISS v3.2に付属しているこのカナダアームですが、実は非常に操作しづらいので、Canadarm2というMODの導入をおすすめします。
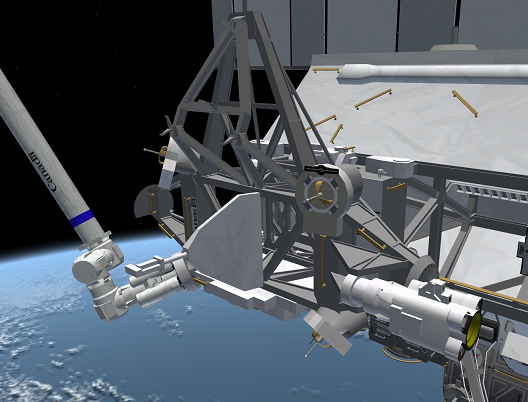
MBSの操作
MBS(Mobile Base System)は、ISSのトラスに設置された移動可能な台車です。
カナダアーム2を接続したまま、トラスの上を自由に移動できます。
F3キーでISSを選択。
Nキーを押してMBSを有効にして、矢印キー←→で移動させる。
移動途中でもう一度Nを押すと、その場で停止する。
F3を押してISSではなくMBSを選択した場合、移動させることはできません。
| N | MBSを有効/無効にする(ISSから) |
| ←or→ | MBSを左右に移動させる(ISSから) |
| ←or→ | エフェクタ(MBSに付属している小さなアーム)を動かす(MBSから) |
| CTRL+A | Attachment managerを起動する(MBSから) |
| D | Attachment point(Attachment managerで選べる取り付け位置)を選択(MBSから) |
| Q | 取り付け/切り離し(MBSから) |
| HOME | 取り付け可能なポイント(赤や青の矢印)を表示する(MBSから) |
| C | カメラ位置を選択(MBSから) |