アトランティスの操作
MODを導入せずに利用できる、初期機体のスペースシャトル・アトランティスについて説明します。
注意
初期機体のスペースシャトルは、とくに操縦が難しい機体のひとつです。
ほかの宇宙船で十分に操縦に慣れてから挑戦することをおすすめします。
この機体には、再突入を補助するオートパイロットが搭載されていません。
Shuttle FleetというMODでは、AutoFCSによる自動再突入が可能です。
キー操作一覧
Orbiter2010、2016で共通
| J | SRBおよび外部燃料タンクの切り離し |
| K | カーゴベイのドアを開閉する |
| G | ランディングギアを展開する |
| Ctrl+B | エアブレーキを展開する |
| Ctrl+U | Kuバンドアンテナを展開する |
| Ctrl+Space | ペイロードベイ・RMSの操作ダイアログを開く |
軌道上での操作
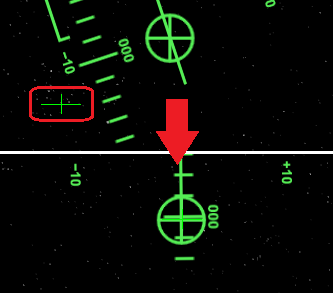
スペースシャトルの軌道用エンジン(OMS)は、機体の軸に対して斜めに設置されている。
したがって、HUD上に表示される十字線を見ながら「手動で」操作する必要がある。
OMSとProgradeなどのオートパイロットは併用できない。
Progradeなどの目印に手動操作で十字線を重ねて、エンジンを噴射する。
Attitude RCS(2016のみ)やPursuitMFDの姿勢制御オートパイロットを使用することもできる。
Shuttle Fleetではこの点が改良されており、通常のオートパイロットが使用できる。
3Dコクピット
3Dコクピット上のMFDを使ってシャトルを操作することができる。
| 左端スイッチ | 中央スイッチ(複数) | 右端スイッチ |
|---|---|---|
| MFDのオン・オフ | MFDの操作 | MFDの明るさを変更する(長押し)※ |
※Orbiter2010+D3D9Clientの環境において、明るさ変更スイッチを押すと強制終了するバグがある。
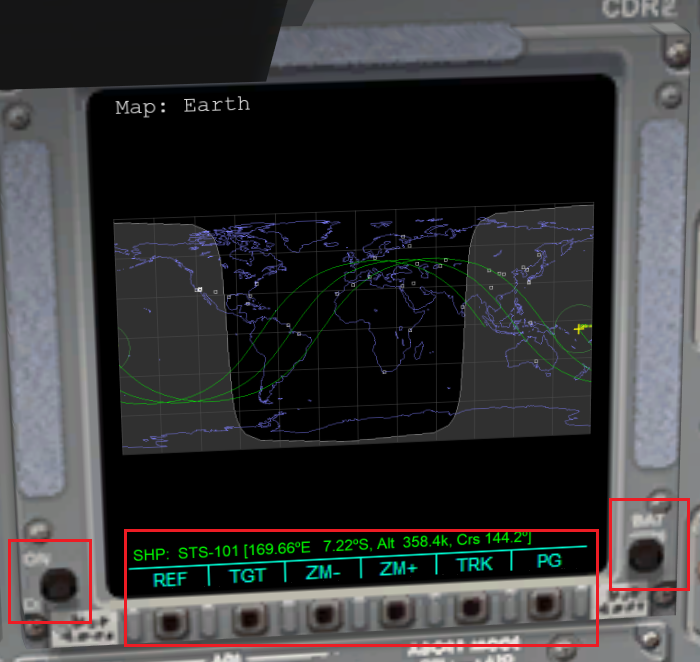
中央に並んだボタンでMFDを操作するが、シャトルのMFDにはボタンが1列しかない。
残りのボタンを呼び出すにはPGボタンをクリックする。
ほかのMFDに切り換えるときは、PGボタンを長押しする。
RMS(ロボットアーム)
Ctrl+Spaceを押してAtlantis Controlメニューを開く。
RMS Operationをクリック。
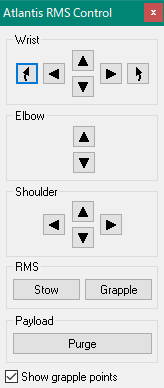
Wrist、Elbow、Shoulderの各ボタンをクリックすると、関節を曲げる・回転させることができる。
| RMS | |
|---|---|
| Stow | アームを格納する |
| Grapple | アームの先端にペイロードを接続する |
| Payload | |
| Purge | ペイロードベイからペイロードを放出する |
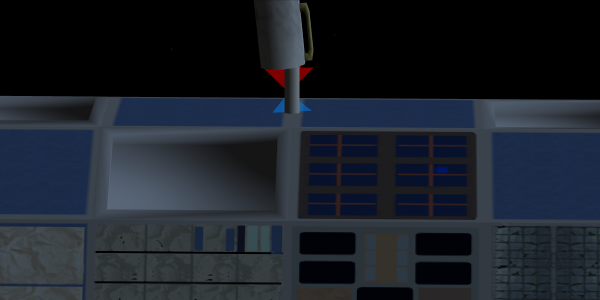
Show grapple pointsにチェックを入れると、接続可能なポイントが表示される。
赤と青の矢印が向かい合うようにRMSを操作して、Grappleをクリックすると接続される。
Payload Door Operation
Ctrl+Spaceを押してAtlantis Controlメニューを開く。
Payload Door Operationをクリック。

ペイロードベイのドアを開く
PL BAY DOORのノブを両方ともENABLEにする。
左中央のノブをOPENにする。
ラジエータを展開する
PL BAY MECH PWRのノブを両方ともONにする。
LATCH CONTROLのノブを両方ともREL(Release)にする。
RADIATOR CONTROLのノブを両方ともDEPLOYにする。
Orbiter2010
打ち上げオートパイロット
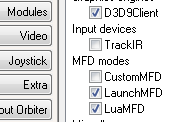
LaunchpadのModulesタブでLuaMFDにチェックを入れる。
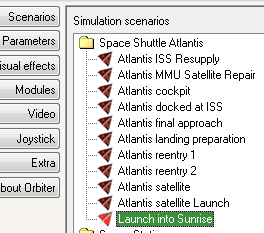
Launch into Sunriseシナリオを選んでゲーム開始。
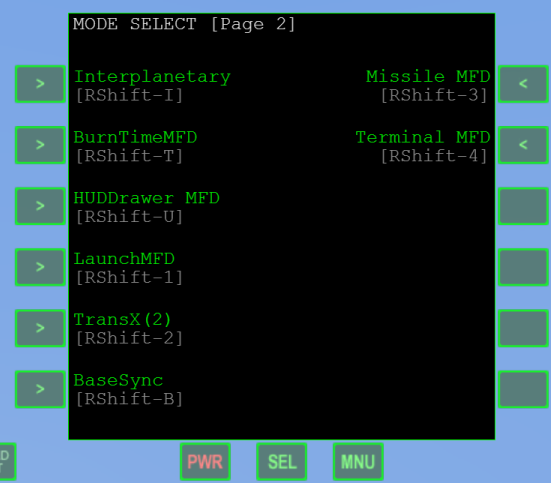
左右どちらかのMFDでTerminal MFDを選択。
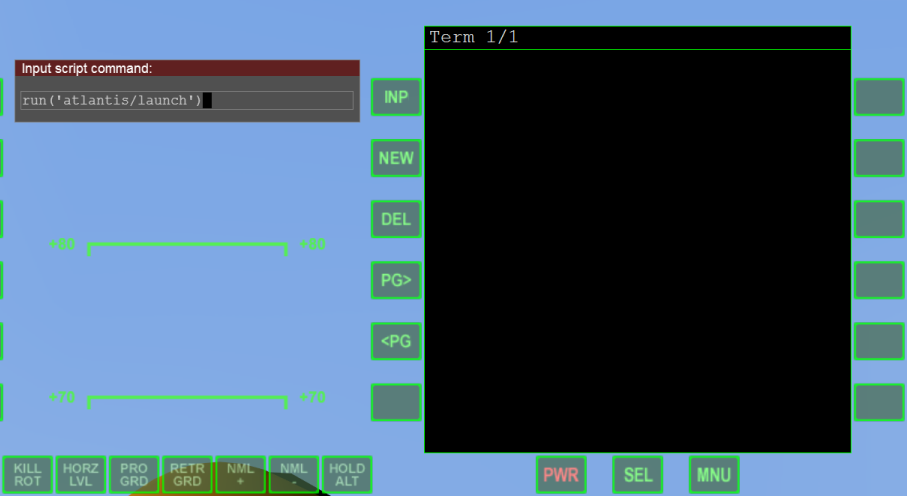
INPをクリックして、run('atlantis/launch')と入力してEnterを押す。
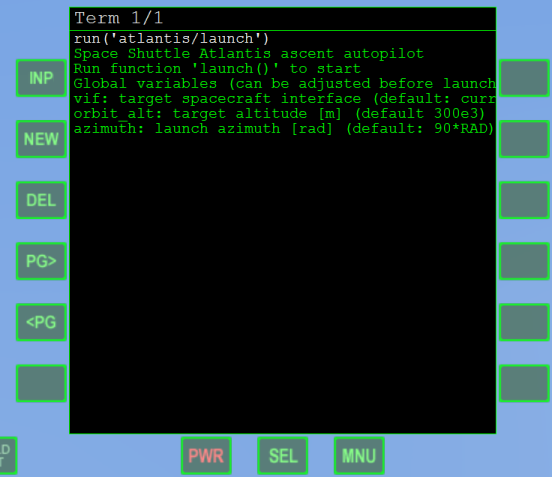
高度を指定する場合:
INPをクリックして、orbit_alt=200e3と入力してEnter。(この場合は高度200km)
打ち上げ方位を指定する場合:
INPをクリックして、azimuth=43*RADと入力してEnter。(この場合は方位43°)
INPをクリックして、launch()と入力してEnterを押すと、自動打ち上げが開始される。
Orbiter2016
打ち上げオートパイロット
MFDの一覧からAscentAPを選択。
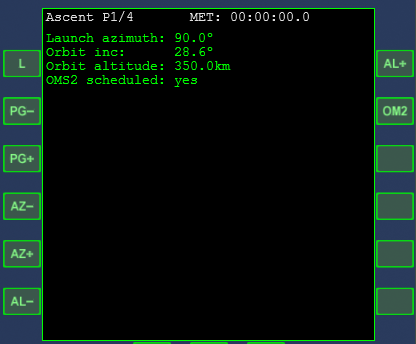
| AZ-orAZ+ | 打ち上げ方位角を指定 |
| AL-orAL+ | 軌道高度を指定 |
| OM2 | OMS2の自動噴射を有効・無効にする |
| L | 自動打ち上げの実行 |
| PG-orPG+ | 画面の切り替え |
Ctrl+Spaceを同時押しして、Atlantis Controlを開く。
ここからでも同じオートパイロットが利用できる。
Ascent Autopilotをクリック。
Launchをクリックすると打ち上げを開始する。
Attitude RCS
Attitude RCSを実行すると、任意の姿勢を保持する。
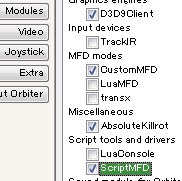
LaunchpadのModulesタブでScriptMFDにチェックを入れる。
MFDの一覧からAttitude RCSを選択。
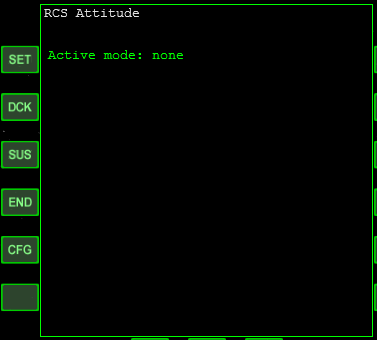
SETをクリック。
CURをクリックして、current (relative)にする。
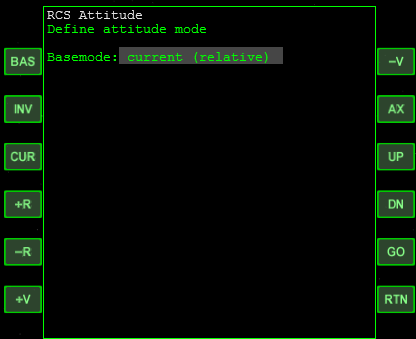
GOをクリックすると、現在の姿勢を維持する。
終了するときは、RTNをクリックして元の画面に戻る。
ENDをクリックするとオートパイロットが解除される。
MODを導入する
- Atlantis Photorealのインストール (2016)