Crew Dragonの操作
キー操作一覧
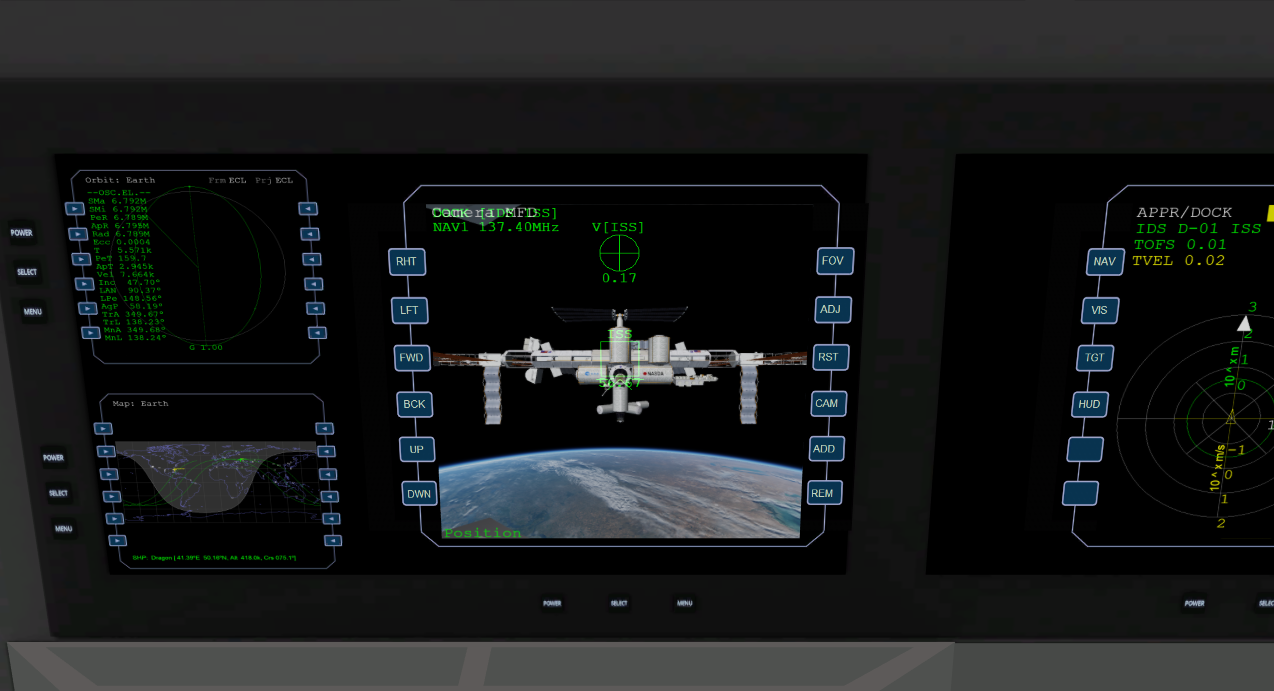
Crew Dragon
クルー・ドラゴン宇宙船。
F8キーで3Dコクピットを選択できる。
パネル下部のボタン類は飾りだが、MFDの操作は可能。
| テンキー+ | ドラコ・エンジン(逆噴射) |
| .or, | スーパードラコ・エンジン |
| W | 積み荷の重量を設定 設定した分だけ船体重量が増える |
| P | 非与圧トランクにペイロードを搭載する |
| K | 船首ハッチを開く |
| G | 側面ハッチを開く |
| J | 非与圧トランクのペイロードを放出する |
| Ctrl+U | 非与圧トランクを分離する ドッキング時は不可 |
| B | ノーズコーンを開く・閉じる |
| V | ドッキングリングを展開・格納 |
| N Ctrl+N |
カメラ位置を切り替え |
| D | RCSをReentry(再突入)とNormal(通常)で切り替え |
| L | パラシュートを使用可能な状態にする |
| Ctrl+8 | 船内照明のオン・オフ |
| 1-3 | 航法灯・船首灯のオン・オフ |
| Ctrl+1-7 | パネル下部のカバー・ボタンを動かす |
| Ctrl+Space | HUD上の表示を消す・戻す |
GoSearcher
回収船。
着水したドラゴン宇宙船を収容できる。
| テンキー+or- | 前進・後退 |
| テンキー1or3 | 左右に舵を切る |
| E | カメラを切り替え |
| NorM | クレーンを上下させる |
| G | クレーンに宇宙船を固定する |
| V | 台車を移動させる |
| B | 台車に宇宙船を固定する |
| L | 照明のオン・オフ |
| K | 発着パッドを使用可能にする |
| J | AS350ヘリコプターを出現させる |
AS350
GoSearcher(回収船)に搭載されるヘリコプター。
船でJを押すと出現する。
回収船でKを押して、発着パッドを使用可能にしておく。
この操作はヘリ側から実行できないので注意すること。
F3キーで選択ウィンドウを開く。
右下のFlatにチェックを入れる。
AS350を選択してApplyをクリック。
| K | エンジン起動・停止 1分後に飛行可能になる |
| テンキー+or- | スロットル(メインローター) |
| テンキー数字キー | 機体を傾ける RCSと同じ。フライトスティック対応 |
| V | 停止して高度を維持する |
| B | 高度を維持する |
| NorM | メインローターを前後に傾ける |
| DeleteorInsert | エレベータートリム |
| L | 航法灯のオン・オフ |
| G | 探照灯のオン・オフ |
| 矢印キー | 探照灯を動かす |
| P | 目標を入力。HUD上に情報が表示される |
| BRG | 方位 |
| Tgt. DIST | 目標までの距離 |
| REL. ALT | 相対高度 |
CrewDragonMFD
左右どちらかのMFDでCrewDragonMFDを選択する。
| DSP | Display | 画面を切り替える |
| オートパイロット | ||
|---|---|---|
| VES | Vessel | 使用する宇宙船を選択する |
| TGT | Target | 着陸目標を入力する |
| REF | Reference | 基準となる天体を選択する |
| DEO | Deorbit | 軌道離脱オートパイロットを開始する |
| RNT | Reentry | 再突入オートパイロットを開始する |
| CHT | Parachute | パラシュートを使用可能にする |
| MOD | Mode | 再突入モードの切り替え |
| OB+orOB- | Orbit | 軌道離脱噴射までの周回数を変更する |
| 宇宙船のシステム | ||
| NOH | Nose Hatch | 船首ハッチ |
| SID | Side Hatch | 側面ハッチ |
| NOC | Nose Cone | ノーズコーン |
| PLD | Payload | ペイロード |
| TNK | Trunk | 非与圧トランクを分離する ドッキング時は不可 |
| RCS | Reaction Control System | Reentry(再突入)とNormal(通常)で切り替え |
| DOK | Docking | ドッキングリングを展開・格納 |
| CAB | Cabin Light | 船内照明のオン・オフ |
| NAV | Navigation Beacon | 航法灯のオン・オフ |
| LMP | Lamp | 船首灯のオン・オフ |
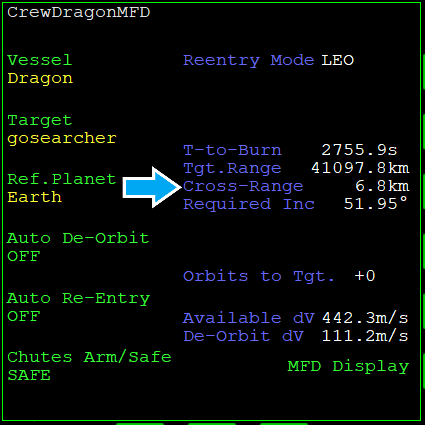
オートパイロット画面
| Reentry Mode | 再突入モード | LEO | 低軌道 高度200km – 600km |
| GEO | 静止軌道 高度600km – 40,000km |
||
| Hyper | 双曲線軌道 高度40,000km以上 |
||
| T-to-Burn | 軌道離脱噴射のカウントダウン | ||
| Target Range | 着陸地点までの距離 | ||
| Cross Range | 宇宙船の針路(軌道平面)から、着陸地点までの距離 | ||
| Required Inc. | 現在位置から着陸地点まで直接降下できる軌道傾斜角 | ||
| Orbits to Target | 着陸までの残り周回数 | ||
| Available dV | 宇宙船の残りDelta V | ||
| De-orbit dV | 軌道離脱噴射に必要なDelta V | ||
再突入モードがGEOかHyperの場合、軌道離脱オートパイロットは利用できない。
以下の数字をIMFDのBaseApproachに入力して実行する。
| Alt | 再突入を開始する高度 |
| ReA | 再突入時の突入角 |
| Ant | 再突入開始地点をA、着陸地点をB、地球の中心をOとしたときの、∠AOBの角度 |
Camera MFD
Camera MFDを導入すれば、MFD上に船外カメラの映像を表示できる。
左側の操縦席でCamera MFDを開く。
UPを何度かクリック。
HUDと重なる形で、前方の視界が表示される。
打ち上げ
以下のMODが必要。
LaunchpadのCrew Dragon 2022フォルダを開く。
Launchと書かれたものが打ち上げシナリオ。
キーボードVを押すと、全自動で打ち上げが実行される。
軌道投入が終了したら、Jを押してドラゴン宇宙船を分離する。
F3キーを押して、宇宙船の選択ウィンドウを開く。
Dragonを選択してApplyをクリック。
ドラゴン宇宙船に移動したら、Bを押してノーズコーンを開く。
ランデブーの手順は、ほかの宇宙船と同じ。
ドッキング
ISSに接近したら、Vを押してドッキングリングを展開する。
通常の手順でドッキングする。
ドッキングしたら、Vを押してドッキングリングを格納する。
Kを押して船首ハッチを開く。
軌道離脱
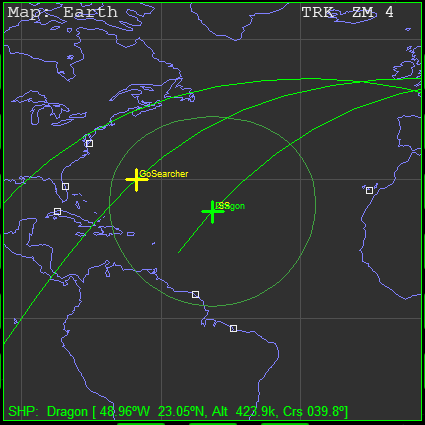
Map MFDを開く。
TGTをクリックして、GoSearcherをターゲットする。
宇宙船の軌道がターゲットに一番近づくタイミングを待つ。
ターゲットまで残り1周を切ったら、CrewDragonMFDを開く。
TGTをクリックして、GoSearcherをターゲットする。
Cross-Rangeが100km以下であることを確認する。
100kmを超える場合は、次の機会を待つ。
Ctrl+Uを押して、非与圧トランクを分離する。
T-to-Burnのカウントダウンを確認する。
残り300秒になるまで待つ。
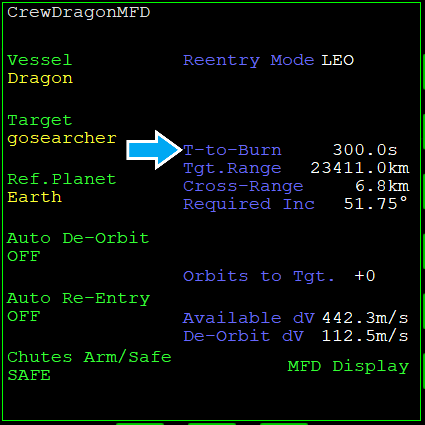
DEOをクリックする。
全自動で軌道離脱噴射が実行される。
オートパイロットの実行中は、タイムワープ10倍までに制限される。
再突入
Bを押してノーズコーンを閉じる。
CrewDragonMFDでRNTをクリック。
全自動で再突入が実行される。
オートパイロット実行中はタイムワープが制限される。
時間を節約したいなら、高度が下がるのを待ってもよい。
CHTをクリックして、パラシュートを展開可能にしておく。