Part7 軌道離脱と再突入の準備
ISSを離れ、逆噴射して周回軌道を離脱します。
フライトスティックがないとき
Delta Gliderには再突入を補助するオートパイロットが搭載されていません。
そのため、フライトスティック無しで再突入・着陸するのはとても難しい作業です。
一部のMOD機体には再突入を補助・自動化する機能が搭載されています。
マウスキーボードのみでプレイするのであれば、こうしたMODの導入をおすすめします。
ISSから分離する
Ctrlを押しながらDを押す。
ドッキングポートを離れる。
RCSを使って少し距離を取る。
RCS LINにしてテンキーの9を押す。
Kを押してノーズコーンを閉じる。
Hを押してOrbit HUDに切り替える。
Map MFD
Map MFDを開く。
北米のケープ・カナベラルを目的地に設定する。
目的地を設定する
TGTをクリック。
矢印キーで項目を移動する。
Spaceports→Cape Canaveralを選択。
Enterを押す。


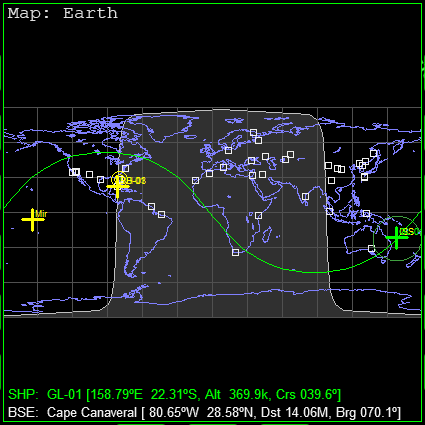
地図上に、目標地点を示す目印が表示される。
Orbiter2010では白い十字、2016では黄色い二重円となっている。
地上の昼と夜
着陸地点が昼の側に来るのを待つ。
タイムワープで時間経過させる。
表示を切り替える
DSPをクリック。
開いた画面でMODをクリック。
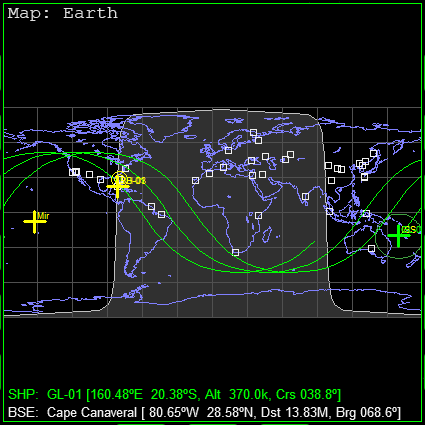
Orbit linesをGroundtrackにしておく。
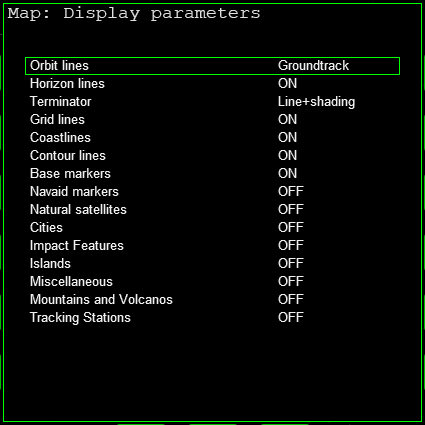
タイムワープが原因で表示が遅い場合は、MFDを再起動する。
PWRボタンを2回クリックする。
軌道離脱噴射
タイミングを待って逆噴射する。
大気圏内に降下する軌道にする。
最後の1周
宇宙船の軌道が目的地に一番近づくタイミングを探す。
タイムワープで時間経過させる。
最接近まであと1周になったら、タイムワープを解除する。
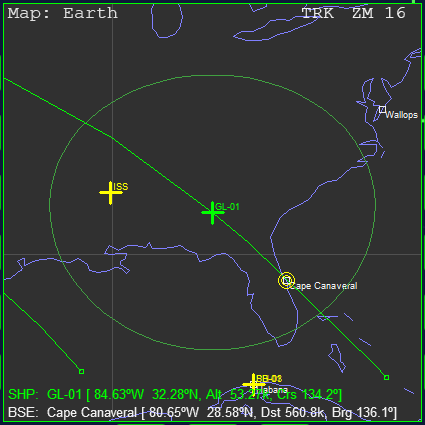
地球の裏側に移動する
目標地点から見て、地球の裏側に移動する。
Map MFD右下のDstの数字を確認する。
Dstが最大になるとき、宇宙船は目標地点のちょうど裏側にいる。
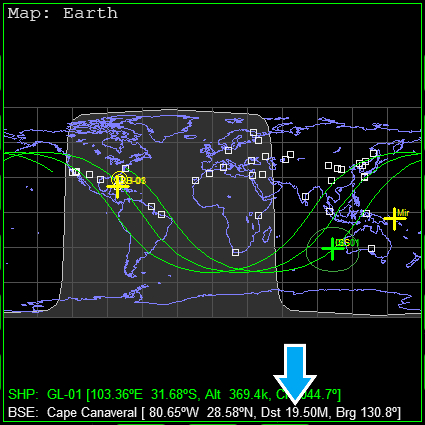
| BSE | 基地 |
| Dst | 距離 |
| Brg | 方位 |
タイムワープで時間経過させると、Dstの数字は大きくなっていく。
Dstの数字が減り始めたら、地球の裏側を通り過ぎたということ。
少し通り過ぎた程度なら問題ないので、そのまま逆噴射する。
ISSから帰還する場合、インド洋上空になることが多い。
逆噴射
Orbit MFDを開く。
RetroGradeorRET-Gをクリック。
機首を後ろに向ける。
メインエンジンを噴射する。
PeAを40km程度に下げる。
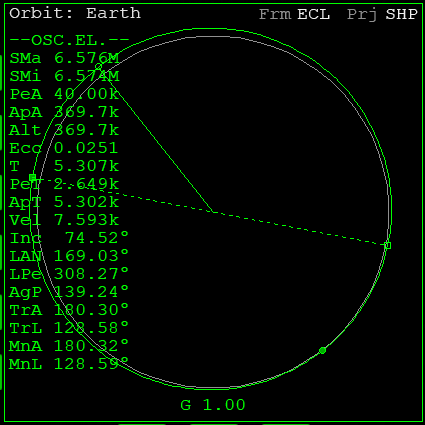
つまり、目的地の近くの大気圏内にPeが来るようにする。
噴射が終わったらRetroGradeを解除する。
VOR/ILS周波数
基地のVORと、滑走路のILSの周波数を入力する。
周波数を確認する
Ctrlを押しながらIを押す。
Object infoのダイアログを開く。
左上のドロップダウンメニューをクリック。
Orbiter2010ならSpaceportを選択。
Orbiter2016ならBaseを選択。
右でCape Canaveralを選択する。
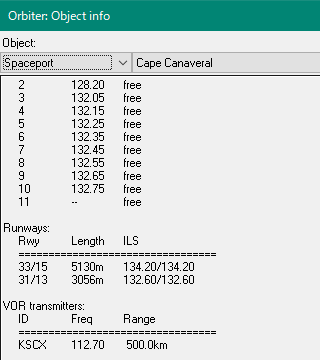
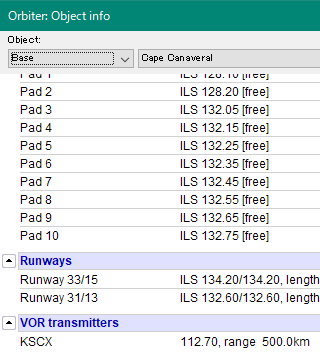
1枚目がOrbiter2010、2枚目が2016
ILSはRunway 33/15を使用する。
(33番/15番滑走路)
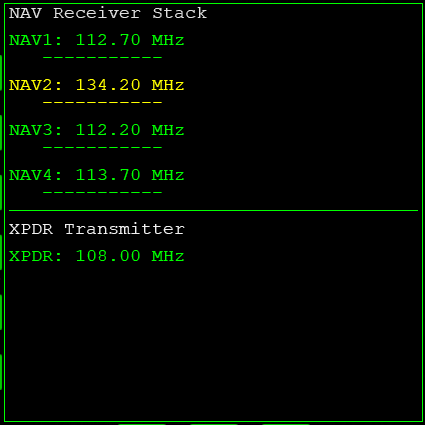
COM/NAV MFD
COM/NAV MFDを開く。
NAV1を112.70にする。
NAV2を134.20にする。
XR2を利用している場合は、ここで以下のページに移動する。
針路を修正する
基地の上空を通過するように、針路を変更する。
Map MFDとSurface MFDを開いておく。

AF CTRLがONになっているのを確認する。
RCS MODEをROTに切り替える。

高度を下げる
Surface MFDでHUDをクリック。
Surface HUDに切り替える。
高度を確認しながら時間経過させる。
高度100kmが近づいてきたら、タイムワープを解除する。
ProGradeをクリック。
機首を前に向ける。
前を向いたら、ProGradeを解除する。
エレベータートリム
Deleteキーを押し続ける。
エレベータートリムを最大まで上げる。
UPが機首上げ、DNが機首下げを意味する。

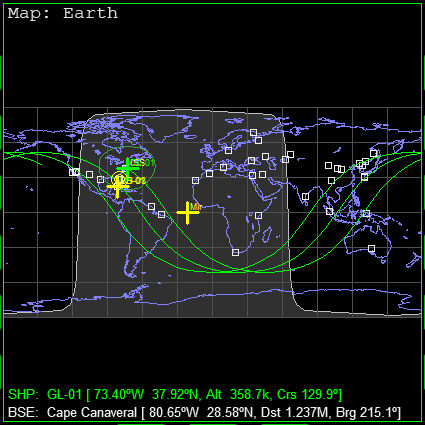
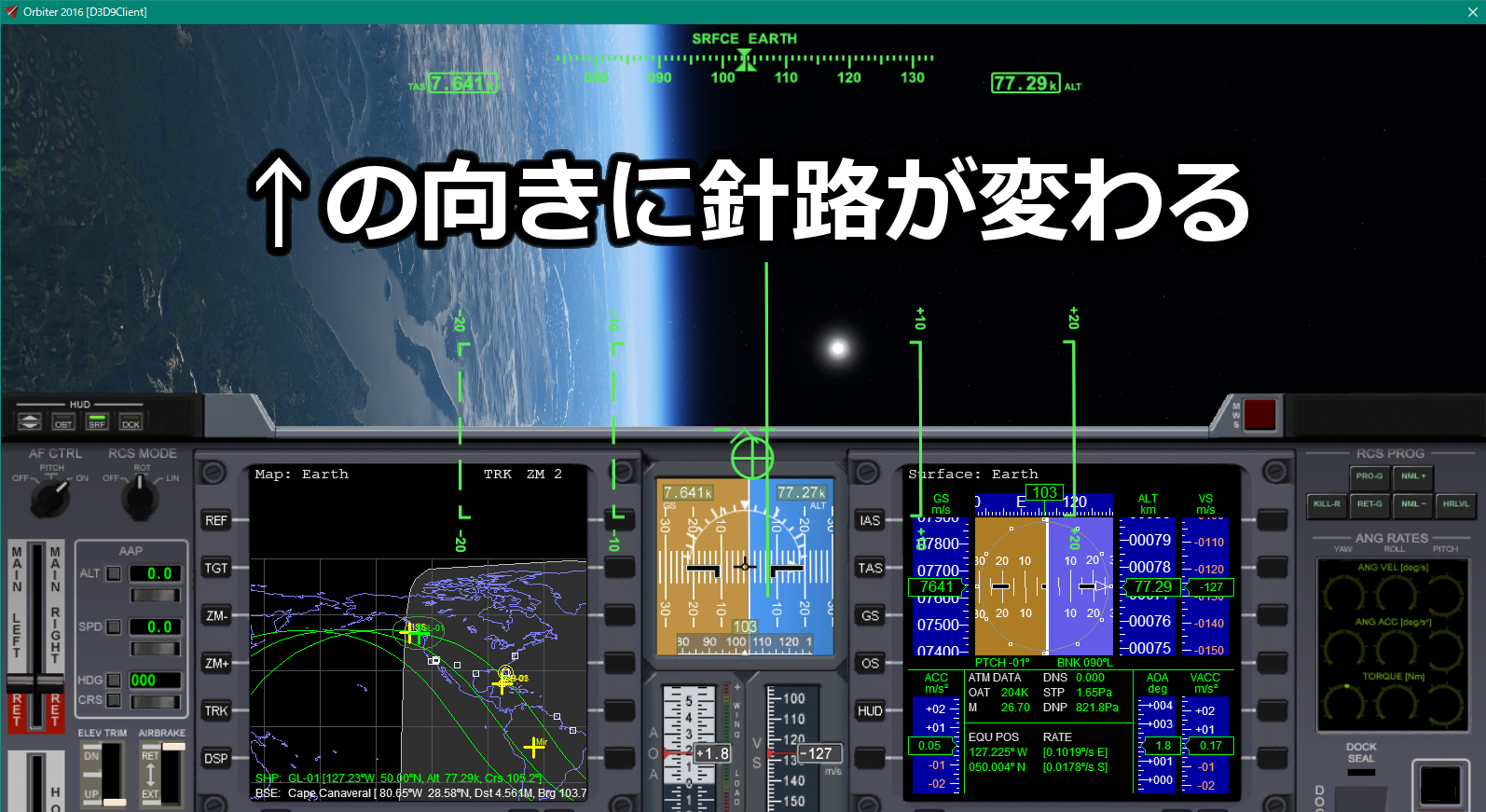
針路を変更する
高度100km以下では、宇宙船は大気の影響を受ける。
機首上げした状態で機体を傾けると、少しずつ針路が変わる。
機体を左右に90°傾けることで、南北に針路を変えることができる。
Map MFD上の自分の軌道が、目的地と重なるようにする。
同時に高度を下げる。
緑色の線が目的地の少し先で途切れるように調整する。
機体を90°傾けたままにすると、高度が下がっていく。
傾きを水平に戻すと高度が上がる。
機体を左右に傾けて、針路と高度を調整する。
このとき、緑の線が目的地の先まで伸びるようにする。
関連項目
| XR2 Ravenstar | Orbiter2016 | 迎え角を制御するオートパイロットが搭載されている。 Aerobrake MFDと併用すれば、マウスキーボードでも狙った場所に正確に降下できる。 |
| Shuttle Fleet | Orbiter2010 | スペースシャトルを再現したMOD。 再突入から着陸までを全自動で実行できる。 |