TransXの基本
TransX MFDの主な機能について説明します。
TransXとは何か
エンジンを噴射して、宇宙船の軌道を変更することを、Manoeuvre(マニューバ)という。
「マニューバを実行する」ということは、「ある方向に、ある速度まで増速する」ということを意味する。
TransXは、このマニューバを計算・実行することができる。
また、増速する量のことをDelta Vという。
- TransXの更新と設定(最新版のダウンロード)
- TransXの解説一覧
TransXの流れ
TransXを使用するときの大まかな流れについて説明する。
惑星間飛行でも、スイングバイであっても、基本的には同じ作業の繰り返しとなる。
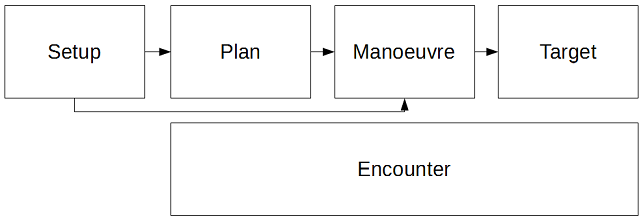
Viewの選択
マニューバ作成の各段階に応じて、Viewを切り替えながら作業する。
ViewはMFD左側のVWボタンをクリックすることで変更できる。
| Setup | 目的地を選択する。 軌道を表すグラフの表示方法などの設定を変える。 |
|---|---|
| Eject Plan Escape Plan |
他の惑星まで飛んだり、スイングバイしたりといったマニューバの計画を立てる。 地球上から月へと飛ぶ場合などでは必要ない。 |
| Manoeuvre | 他の惑星に出発したり、軌道修正をしたりするためのマニューバを作成する。 |
| Target | エンジンを噴射し、マニューバを実行するときに使用する。 白い十字線の中央に目印(緑色の×)を合わせることで、機体の向きを決められる。 |
| Encounter | 目標の惑星に最接近したときの高度などが表示される。 これを見ながら、マニューバやプランを微調整する。 |
例えば、地球から火星へのフライトは以下のような流れになる。
| 1. | View:Setup | Marsをターゲットに選択 |
| 2. | View:Eject Plan | 地球→火星遷移軌道を作成 |
| 3. | View:Escape Plan | 打ち上げ、パーキング軌道へ |
| 4. | View:Manoeuvre | Planを参考にしてマニューバを作成する |
| 5. | View:Target | マニューバを実行、遷移軌道に乗る |
これらの順番は絶対ではなく、前後することもある。
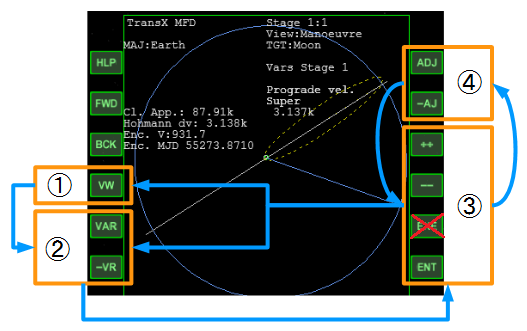
VARの選択
VARor-VRをクリックして、必要な機能にアクセスする。
| 1. | VW | Viewを切り替える。 |
| 2. | VARor-VR | 使いたい機能を選択する。 |
| 3. | ++or-- ENT |
数値を入力/機能を実行する。 |
| 4. | ADJor-AJ | ボタンの感度を変える。 変更したら3に戻る。 |
| 2に戻る | 同じViewの別の機能を使う。 | |
| 1に戻る | Viewを切り替える。 |
| VAR | 変数 |
| ADJ | 調整 |
Stageの選択
FWDをクリックすると、次のStage(ステージ)が現れる。
BCKをクリックすると、一つ前のステージに戻る。
Stage 1は地球を周るパーキング軌道。
Stage 2は地球を出発点とし、目的地の惑星に至る遷移軌道。
Stage 3は目的地の惑星の拡大図、というように使い分ける。
| FWD | 次に進む |
| BCK | 前に戻る |
Viewの解説
各Viewで使える機能のうち、主要なものについて解説する。
VARをクリックすると、それぞれの機能を呼び出すことができる。
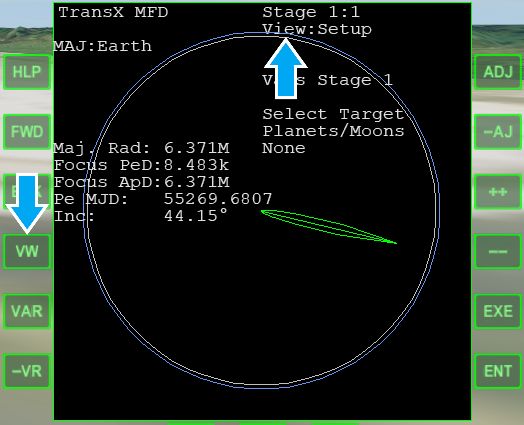
View:Setup
マニューバを作成するための準備として、さまざまな設定を変更する。
Select Target
ターゲット(目的地)を選択する。
地上から他の惑星に向かう場合は、まず++をクリックしてEscapeを選択。
そこからFWDをクリックして次のステージを作成することで、他の惑星をターゲットとして選べるようになる。
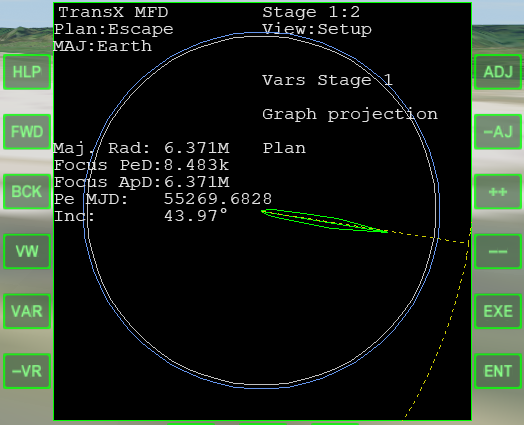
Graph Projection / Scale to View
軌道予測のグラフと、目標となる天体の表示方法を変更する。
計算結果や実際のマニューバには影響しない。
角度の問題でグラフが見づらいとき、目標の惑星を拡大して見るときに使用する。
View:Eject Plan
遷移軌道のPlan(計画)を作成する。
惑星間飛行や、月から地球に帰ってくるときなどに使用する。
基本的な操作はView:Manoeuvreとまったく同じ。
ただし、実際のマニューバを作成するわけではなく、「マニューバを作るときに参考にする」ための計画を作る。
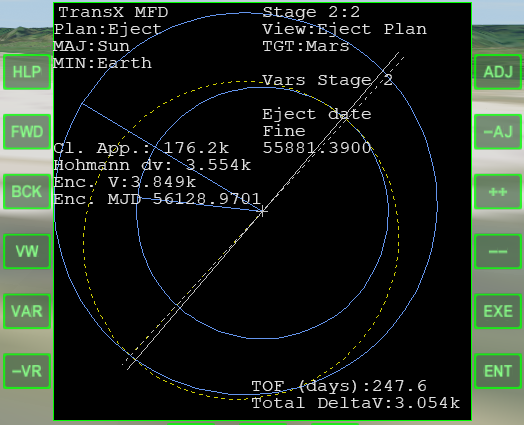
Auto-min機能を使って、自動で遷移軌道を作成することができる。
- ADJor-AJをクリックして、Auto-minを選択。
- VARをクリックして、マニューバの要素すべてをAuto-minにする。
- この状態で、Eject. date(他の惑星に出発する日付時刻)を操作する。
View:Escape Plan
打ち上げの計画(プラン)を作成する。
惑星間飛行においては、あらかじめ作成しておいた遷移軌道に接続できるように打ち上げる。
したがって、Eject Plan→Escape Planの順番で作業することになる。
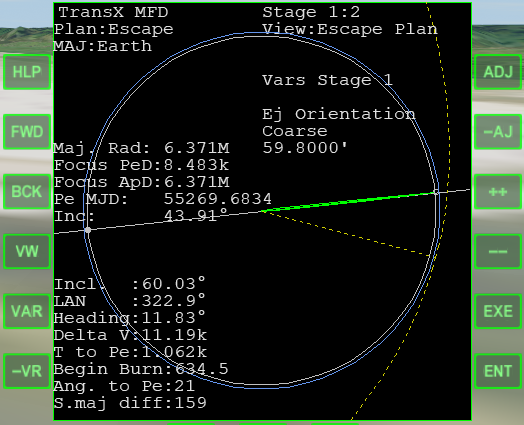
Pe Distance
他の惑星に向かう前のパーキング軌道の高度を決める。
Alt(地上からの高度)ではなく、Rad(惑星の中心からの半径)を指定する。
地球の場合、半径は6.371M(6.371Mm(メガメートル)=6371km)なので、6.571Mなら高度200kmになる。
Ej Orientation
Ej Orientation = Eject Orientation
「打ち上げ時にどの方角に向かって飛ぶか」を決める。
++or--をクリックして、白い線と緑の線が重なるようにすると、Heading(打ち上げ方位)が決まる。
その方角に向かって打ち上げることになる。
エンジンを噴射するとHeadingの数字は消えるので、暗記するかメモを取っておく。
View:Manoeuvre
マニューバの解説については以下の記事を参照。
Part11 TransXのマニューバ
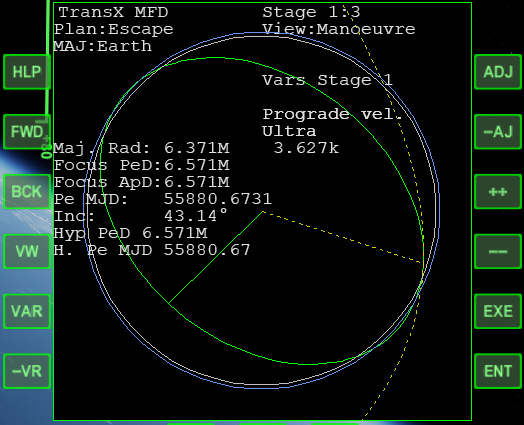
必ず最初に、++をクリックしてManoeuvre modeをonにする。
マニューバを実行し終わったら、必ずoffにする。
ENTをクリックして、Delta Vなどの数字を直接入力することもできる。
View:Target
エンジンを噴射し、マニューバを実行するために使用する。
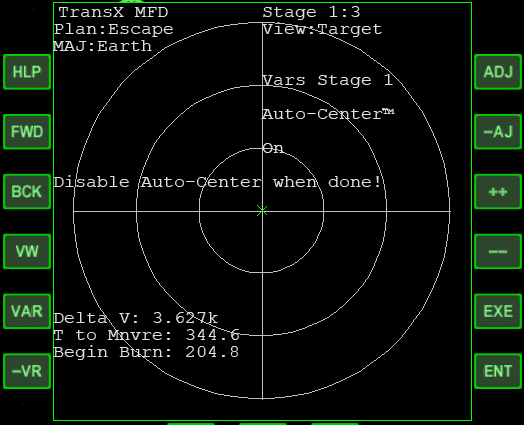
Auto-centerを選んでonにすると、自動で機体の向きを合わせてくれる。※
※Auto-centerが安定しない場合は、いったんAuto-centerをoffにする。
手動で宇宙船を回転させ、白い十字の中央に緑の×が来るようにする。
ある程度向きを合わせたら、もう一度Auto-centerをonにする。
Begin Burn(エンジン噴射開始)の数字がゼロになったらエンジンを噴射する。
マニューバが終わったら、必ずAuto-centerをoffにする。
Delta Vが0になるまでエンジンを噴射するのが基本だが、少し残しておいて、Manoeuvre modeをoffにしてから微調整したほうがよい。
View:Encounter
目標の天体にもっとも接近したときの高度や、予想落下地点などの情報を表示する。
これを見ながらマニューバを作成したり、軌道を修正したりする。
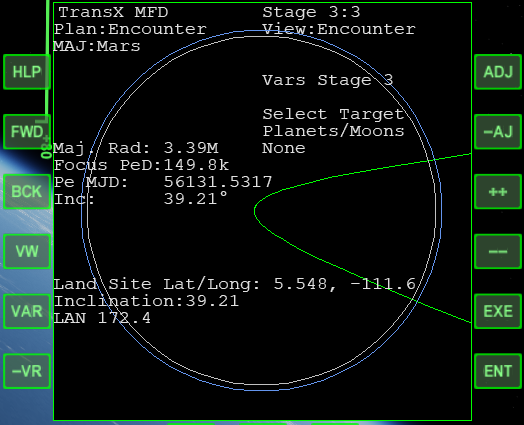
| Focus PeD | 現在の軌道から予測されるPeの高さ。 惑星の中心からの半径で表示される。 |
| Hyp PeD | 現在作成中のマニューバから予測される、仮のPeの高さ。 |
| Min Alt | 最接近時の地表からの高度。 |
| Offplane Dist | 地上基地などの目標地点から自分の軌道までの距離。 |