Part1 打ち上げから軌道投入まで
宇宙船を打ち上げて、周回軌道に投入します。
シナリオファイル
Orbiter_ng.exeをダブルクリック。
Launchpadを起動する。
Scenariosをクリック。
シナリオファイルの一覧を開く。
ChecklistsフォルダのDG to ISSを選択。
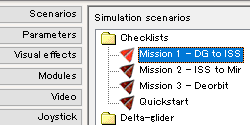
ダブルクリックでゲームを開始する。
Map MFD
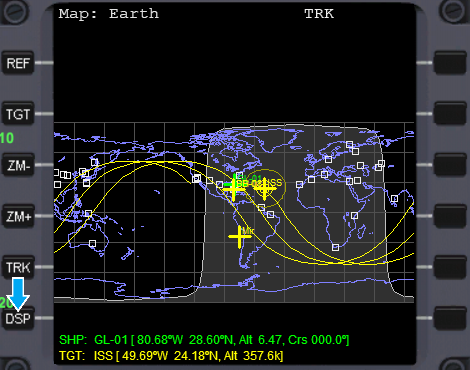
Map MFDは、地図上に軌道を表示する。
これを使って打ち上げのタイミングを待つ。
表示を切り替える
DSPをクリック。
MODをクリック。
Orbit linesをOrbit planeに切り替える。
軌道の表示方法が変更される。
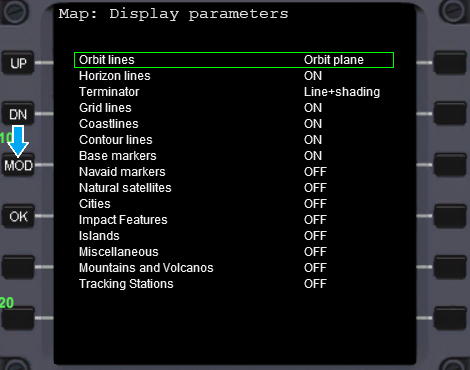
OKをクリックして元の画面に戻る。
打ち上げのタイミング
黄色い線が、緑の十字と重なるのを待つ。
ZM+をクリックして拡大する。
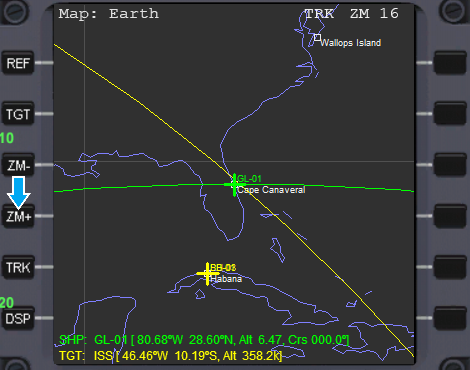
黄色い線はISSの軌道を表す。
緑の十字は宇宙船の位置を表す。
キーボードTで時間を進める。
Rで時間の進みを遅くする。
キーを押した回数に応じて、タイムワープの倍率が変化する。
タイムワープの倍率は画面右上に表示されている。
10xなら10倍、100xなら100倍になる。
| TGT | target | ターゲットを指定する |
| ZM-orZM+ | zoom | 縮小・拡大 |
| TRK | track | 自機を中心に表示 |
| DSP | display | 画面を切り替える |
| MOD | modify | 設定を変更する |
| UPorDN | up, down | 上下にスクロール |
| <or> | 左右にスクロール |
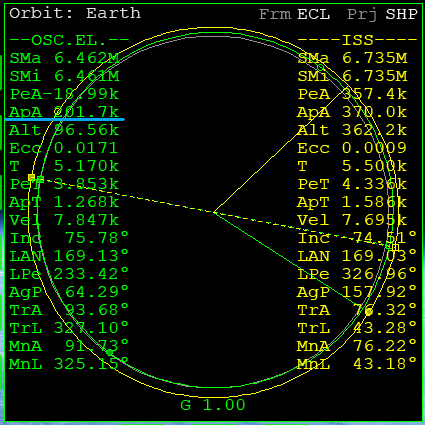
Orbit MFD
黄色い線が緑の十字と重なったら、タイムワープを解除する。
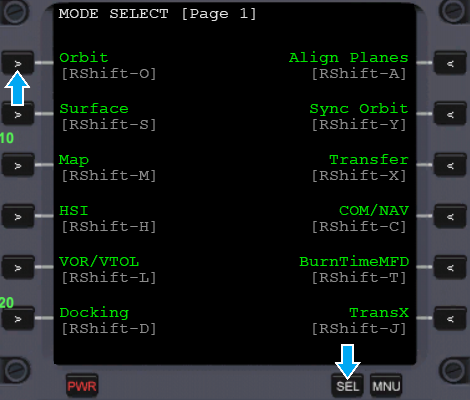
Map MFDの下にある、SELをクリック。
Orbitの左にある、>をクリック。
Orbit MFDに切り替える。
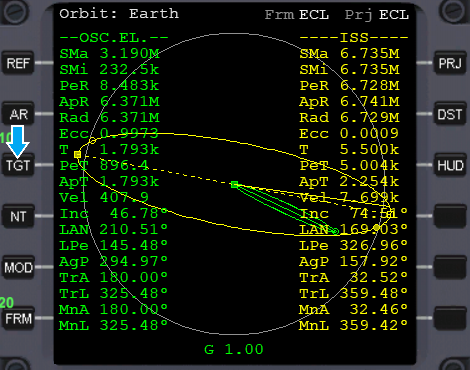
ターゲットを指定する
TGTをクリック。
Enterキーを押す。
キーボードでISSと入力する。
Enterを押して確定する。
ISSがターゲットに指定される。
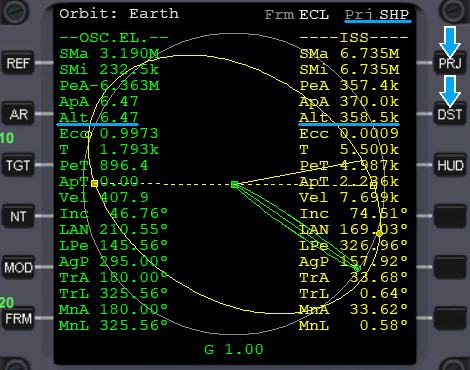
表示を切り替える
PRJをクリック。
Prj SHPにする。
DSTをクリック。
RadをAltに切り替える。
| SEL | select | 使用するMFDを選択する |
| PRJ | projection | 投影。何を基準に軌道を描画するか選択する SHP = Ship = 宇宙船 |
| DST | distance | 天体から宇宙船までの距離 |
| Rad | radius | 動径。天体の中心からの距離 |
| Alt | altitude | 地表からの高度 |
打ち上げ
離陸して、打ち上げ方位へと旋回する。
旋回を終えたら上昇する。
離陸する
エンジン全開で固定する。
テンキー+を押しながら、Ctrlを押す。
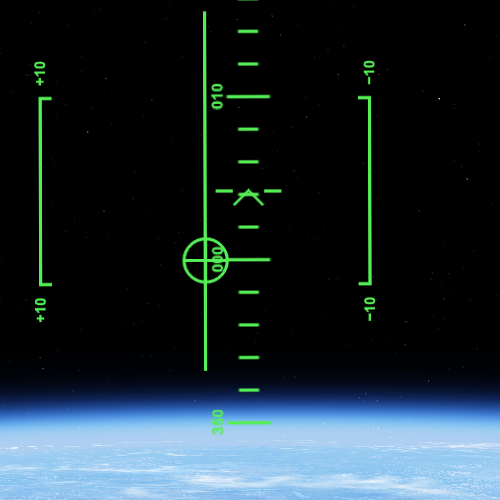
HUDの左上に速度が表示されている。※
160(秒速160m)になるまで加速する。

※見づらいときは、Alt+HでHUDの色を変更できる。
機首を上げて上昇する。
テンキー2を押すか、スティックを手前に引く。
地面を離れたら、キーボードGを押す。
ランディングギアが収納される。
旋回・上昇する
右旋回して、方位137に機首を向ける。
旋回を終えたら、機体を水平にする。

機首を上げて上昇する。
できるだけ方位137を維持する。
迎え角を60°にする。

テンキー5を押すと、機体の回転が止まる。
もう一度押すと解除される。
一度で機体の向きを合わせるのは難しい。
何度か回転を止めて微調整する。
機首を下げる
HUDの右上に高度が表示されている。
高度20kmで機首を下げる。
迎え角を20°にする。

テンキー5を押して、迎え角を維持する。
下がってきたら機首を上げる。
加速を続けるにつれて、方位が137からずれてくるが、これは気にしなくてよい。
RCSを起動する
高度30kmで、RCS MODEをROTにする。
Ctrlを押しながら、テンキー/を押す。
大気が薄くなるので、RCSを起動しておく。

| RCS | 姿勢制御装置 |
| ROT | 回転 |
| LIN | 直線移動(平行移動) |
迎え角20°を維持して加速を続ける。
ApAを200kmにする
秒速6kmに到達したら、機首を下げる。
機体を水平にする。

\( \bigoplus \) のマーカーは、進行方向を表している。
\( \bigoplus \) が迎え角0°より下がらないようにする。
マーカーが下がってきたら機首を上げる。

Orbit MFDでApAの数字を確認する。
ApAが200kを超えたら、エンジンを切る。
テンキー*(アスタリスク)を押す。
仮の軌道なので、正確に200kmにする必要はない。
軌道投入
Hキーを2回押す。
HUDをOrbit HUDに切り替える。
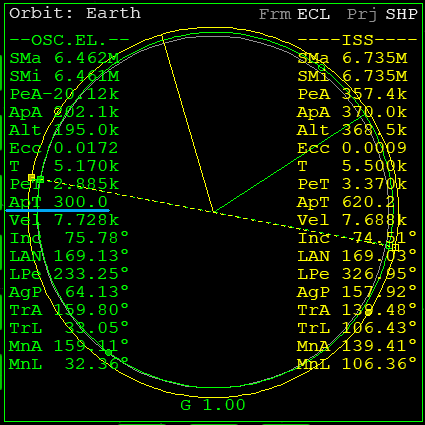
遠地点に移動する
Apで再加速して、宇宙船を軌道に乗せる。
Orbit MFDでApTの数字を確認する。
残り300まで早送りする。※
※ApTが300 = 300秒後にApに到達するということ。
| Ap | 遠地点。軌道上で、地球から一番遠い点 |
| ApT | 遠地点までの時間 |
| ApA | 遠地点高度 |
| Ecc | 離心率。軌道がどれだけ円に近いか表す。0なら完全な円になる |
オートパイロットを実行する
ProGradeボタンをクリック。
オートパイロットが機首を進行方向に向ける。
| Orbiter2010 | ProGrade |
| Orbiter2016 | PRO-G |


1枚目がOrbiter2010、2枚目が2016
オートパイロットの実行中は、タイムワープを10倍までに制限すること。
軌道投入噴射
ApTが0になったら、エンジンに点火する。
テンキー+を押す。
Orbit MFDでEccの数字を確認する。
Eccが0に近づくまで噴射を続ける。
数字が小さくなったら、エンジンを切る。
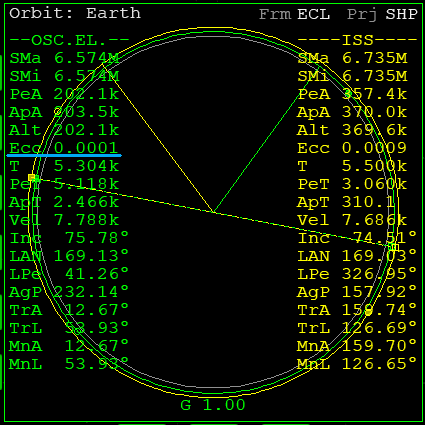
RCS MODEをLINにする。
テンキー/を押す。
テンキー6or9のどちらかを押す。
さらにEccを小さくする。
Eccを完全にゼロにする必要はないが、できるだけ小さくしておく。
オートパイロットを解除する
ProGradeorPRO-Gをクリック。
オートパイロットを解除する。
オートパイロットを解除しないままにしていると、操縦不能になることがある。
テンキー5でもProGradeを解除できる。