ISS v3.2 プログレス&ソユーズの操作
打ち上げ+軌道投入
打ち上げはオートパイロットで実行されるので、宇宙に上がるまで待つ。
宇宙に出てしばらくすると、ソーラーパネルとアンテナが自動的に展開される。
キーボードでEを押して、エンジンカバーを開放(Open)する。
Mを押して、RCS modeをContinuousにする。※
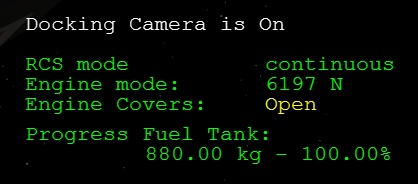
※Continuousのほうが操縦しやすいですが、Impulseのままでもかまいません。
ランデブーの操作はほかの宇宙船と同じ。
ランデブーの方法
ドッキング
接近したら、キーボードでUを何度か押してDocking cameraにする。※
TGTをクリックして、適当なドッキングポートを選択する。
※Docking MFDを使えば、Docking cameraを使わなくてもドッキングできます。
ソユーズ・プログレス用のドッキングポートに設置されている目印を探す。
これに白い十字線を重ねてドッキングする。

ISSへの補給(プログレスのみ)
F3キーを押してISSを選択。Uを何回か押して補給画面にする。
プログレスからは補給できない。
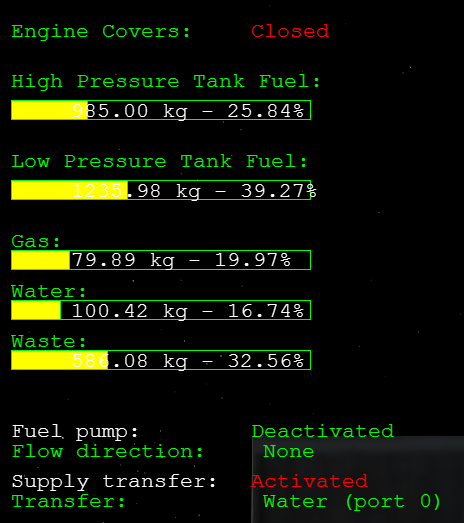
物資・廃棄物
Bを押して種類を選択。
Ctrl+Xでドッキングポートを選択。
Ctrl+Yを押してActivatedにすると、補給が開始される。
Waste(廃棄物)の場合はプログレスに移される。
燃料※
※ISSが姿勢を制御するための燃料。プログレス自身の燃料は無関係
Vでタンクの種類を選択。
Ctrl+Tでドッキングポートを選択。
Ctrl+Fで補給を開始する。
再突入
プログレスは再突入させると燃えつきるようになっている。
適当な場所を選んで落下させる。
ソユーズの場合は、まず目標地点の付近に近地点(Pe)を作る。
高度60kmくらいを目安にする。
Orbiterチュートリアル Part7 軌道離脱と再突入の準備
噴射が終わったら、まずキーボードでAを押して軌道モジュールを減圧する。
Jを2回押して、軌道モジュールと推進モジュールを分離する。
Surface MFDを見ながら、バンク角(左右への傾き)をゼロにする。
RCS ROTでテンキーの4か6を押して調節する。
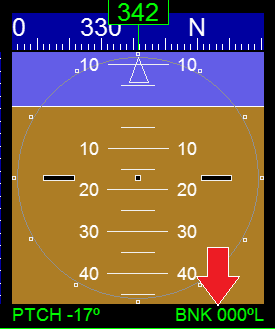
バンク角がゼロになっていれば、自動で突入角度を調整して、宇宙飛行士にかかるGを最大で4G程度に抑えてくれる。