PursuitMFD こうのとり・ドラゴン宇宙船のキャプチャー
PursuitMFDを使って、ロボットアームでの係留位置に宇宙船を静止させる方法について解説します。
準備
あらかじめ宇宙船をISSとランデブーさせて、ISSの下方に移動しておく。
ドラゴン宇宙船のMODの場合、ランデブーが完了した状態でゲームを始めることもできる。
approaching ISSと書かれたシナリオでは、ISSの下方にドラゴン宇宙船が配置されている。
Dockingモードにする
PursuitMFDを開く。
DOCをクリックして、Dockingモードにする。
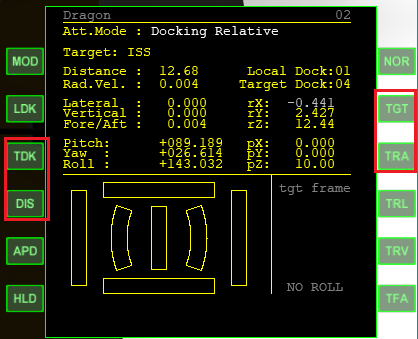
ターゲットを指定する
ISSの4番ドッキングポートを利用する。
TGTをクリック。ISSと入力してEnterを押す。
TDKをクリック。4と入力してEnter。
ドッキングポートからの距離を指定する。
DIS(Distance)をクリック。0 0 10と入力してEnter。
オートパイロットを実行する
TRAをクリックすると、オートパイロットを開始する。
ドッキングポートの真下に移動したら、RCS ROTで姿勢を変える。
グラプルフィクスチャ(ロボットアームでの接続ポイント)を上に向ける。
カナダアームを操作して、宇宙船をキャプチャする。
Canadarm2の操作
ISSの姿勢制御が有効になっている場合は、Lを押してDragon宇宙船をLVLH姿勢にしておく。※
※Level Horizon
| TRA Trim All |
すべての方向の距離を入力した数字に一致させる |
| TRL Trim Lateral |
横方向の距離を入力した数字に一致させる |
| TRV Trim Vertical |
上下方向の距離を入力した数字に一致させる |
| TFA Trim Fore/Aft |
前後方向の距離を入力した数字に一致させる |
別の方法
ISSの3番ドッキングポートをターゲットする。
DISをクリックして0 -15 -50と入力する。
NORを何度かクリックして、ロール軸の制御を有効にする。
APDをクリック。
全自動で4番ドッキングポートの位置に移動し、キャプチャに適した姿勢になる。
APDをクリックすると、HLDとTRAの両方が有効になる。
3番ドッキングポートはISSの後ろ、4番ドッキングポートはISSの下方に設置されている。
3番ポートの向きを指定して、4番ポートの下まで移動させることで、位置と向きの両方を自動で制御させることができる。