Dragon1宇宙船の操作
Dragon1宇宙船の操作は、Orbiter2010/2016で共通です。
キー操作一覧
| N | コクピット視点を船内/船外に切り替え |
| C | HUDの表示をMain/Re-entryに切り替え |
Main(ランデブー・ドッキング)
| W | 積み荷の重量を設定(設定した分だけ船体重量が増加する) |
| P | 非与圧トランクにペイロードを搭載する |
| K | グラプルフィクスチャ(ロボットアームでの取り付け位置)を展開/格納 |
| G | 船体前部のハッチを開く |
| J | 非与圧トランクのペイロードを放出する |
| M | 非与圧トランクを分離する |
| V | フェアリングを分離し、太陽電池パネルを展開する |
| B | 太陽電池パネルを太陽追跡モードにする/固定する |
Re-entry(再突入)
| Y | 軌道離脱オートパイロットを実行/解除 |
| E | 再突入オートパイロットを実行/解除 |
| D | RCSを通常モード/再突入モードに切り替え |
| S | 着陸目標を設定 |
回収船
| G | クレーンを上下させる |
| K | クレーンに宇宙船を固定する |
打ち上げ・ランデブー
launchと書かれたシナリオでゲームを開始する。
Falcon9でVを押すと、10秒後に全自動で打ち上げ・軌道投入される。
先端のフェアリングも自動で分離される。
軌道に乗ったら、Jを押してDragonを分離する。
F3キーを押して、Dragonを選択してOKorApplyをクリック。
Vを押して太陽電池パネルを展開する。
打ち上げのタイミングとランデブーの操作については、Orbiterチュートリアルを参照すること。
ドッキング
ISSに接近できたら、ドッキングポートの真下に移動する。
Kを押してグラプルフィクスチャを展開する。
F3キーを押して、SSRMSDを選択してOKorApplyをクリック。
SSRMSDを操作して、Dragon宇宙船をドッキングさせる。
PursuitMFDを利用すると、宇宙船を係留位置に待機させることができる。
軌道離脱
Cを押して、HUDをReentryに切り替える。
Sを押して、RecoveryVesselと入力してEnterを押す。
Map MFDを開いて、あと1周でRecoveryVesselに最接近するタイミングを待つ。※
※Map MFDに表示されていない場合は、TGTをクリックしてターゲットする
HUD上のCross Range Error(黄色)が125km以下になっていることを確認する。
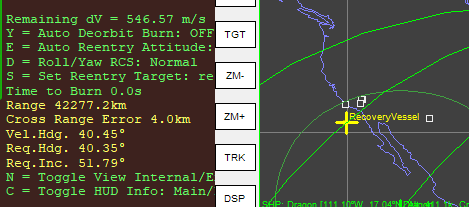
Yを押すと、全自動で軌道離脱噴射が実行される。
再突入
Mを押してトランクを切り離す。
Eを押すと、全自動で再突入を実行する。
パラシュートも自動で展開される。
回収
着水したら、F3を押してRecoveryVesselに乗り換える。
回収船は普通の宇宙船と同じように操作できる。
回収船の後部をDragonに向けて、Gを押してクレーンを下げる。
Kを押してDragonを固定する。
もう一度Gを押して、Dragonを回収すればミッション終了となる。