コメント
困ったときは
ゲーム中に問題が発生した場合は、以下のページを利用してください。
コメントを投稿する
ご意見・ご感想などを自由にお書きください。
回答はこのページの下部に掲載します。
多忙につき、回答に数日~数週間かかることがあります。
回答
2021-03-31
orbiter2010のデルタグライダーのMFDなどが1秒間隔で更新されます。これって仕様ですか?
コメントありがとうございます。
以下のページを参照して、MFDの更新速度を設定してください。
2021-06-01
Orbit MFDのMFD control layoutの画面の中に「OSC.EL.」と描画されていますが、意味はわかりますでしょうか?
コメントありがとうございます。
Osculating Elements(接触軌道要素)を略してOSC.EL.と表記しています。
これは、Osculating Orbit(接触軌道)のElement(要素)を意味します。
接触軌道とは、宇宙船の現在の軌道状態ベクトルと、中心天体(完全な球体とみなす)の重力から予測される軌道を意味します。
現実の宇宙では、他の天体の重力や、中心天体の形状(地球は完全な球体ではなく、赤道方向に膨らんだ楕円体となっている)などの影響によって、宇宙船の軌道は変化します。
このような影響を考慮に入れずに計算されたものが、接触軌道要素ということになります。
Orbiter本体のシミュレーションでは、複数の天体から受ける重力の影響を数値計算によって再現しています。
一方でOrbit MFDは、接触軌道という単純なモデルを採用しているので、誤差が生じることがあります。
また、Nonspherical
gravity sourcesのオプションを有効にしたときに、Orbit MFDの表示に誤差が生じることがあります。
2021-06-24
orbit MFDなどの peの丸(●)が、orbiter ngではapの丸(〇)になってしまいます。原因は何でしょうか?
orbiter.exeとOrbiter_ng.exeでMFDの表示が変わるということはありません。
ちなみに、当サイトの画像はすべてOrbiter_ng.exe+D3D9Clientで撮影されたものです。
Part3 ランデブーのための軌道力学
可能性としては、Nonspherical gravity
sourcesの設定が有効になっているということが考えられます。
Orbiter_ng.exeの設定はorbiter.exeに反映されないため、結果としてMFDに違う結果が表示されることになります。
設定などに不審な点がなく、それでもMFDの表示に異常が見られる場合、以下のページで不具合として報告してください。
また、スクリーンショットを共有していただけると問題を解決しやすくなります。
2021-06-27
スタートレックのクリンゴン艦隊で、再突入角度と速度が制御できなくて地表に激突してしまいます。安全に再突入計画を作成の上実行することはできませんか?
大推力の架空機を使用するのであれば、軌道速度をゼロにして垂直に降下する方法をおすすめします。
詳細はチュートリアルの月着陸編を参照してください。
2021-07-01
Map MFDのターゲットに、スタートレック等の惑星の地上基地を指定することはできますでしょうか?
基地が存在するか確認する
地球以外の天体、とくに架空の惑星系の場合は、地上基地が存在しないことがあります。
Map MFDを開いて、TGTをクリック。
矢印キー↓でSpaceportsを選択。
→を押して何も出てこない場合は、その天体に地上基地は存在しない。
何もないところに降りる
地上基地が存在しない場合は、自分で着陸地点を適当に決めて降下する、ということになります。
あらかじめ、できるだけ高度の低い円軌道に投入しておく。
降下したい場所が近づいてきたら、機首を後ろに向けてエンジンを噴射する。
逆噴射の手順は以下のチュートリアルを参照すること。
着陸目標を設置する
地上基地が存在しなくても、地上に宇宙船が存在すれば、それを着陸目標にすることができます。
シナリオエディタを使って、ダミーの宇宙船を任意の地点に設置する。
Map MFDを開いて、TGTをクリック。
Enterを押して、設置した宇宙船の名前を入力する。
MFD上に宇宙船の位置を示す目印が表示されるので、それを目指して降下する。
2021-07-05
VORの信号が送信されていないケースでの降下手順をご教示お願い申し上げます。
VORは基地・着陸パッドの位置を指示してくれますが、着陸に必須というわけではありません。
以下のチュートリアルに従って、逆噴射姿勢に入ったら、そのままメインエンジンを噴射。
Orbit HUD左上のOS(軌道速度)がゼロになったらエンジン停止。
垂直に落下することになるので、ホバーエンジンを使うか、滑空して適当な場所に着陸する。
PursuitMFD 月面基地への自動着陸において、Laindingプログラムを開くとありますが、Landing(自動着陸)プログラムを開くではないでしょうか?
報告ありがとうございます。修正しておきました。
2021-07-08
過去に削除されているXR2などの機体ファイルをWayback Machineでダウンロード・インストールしてもよろしいでしょうか?
Wayback Machineは、ウェブ上に公開されたファイルを「作者に無断で」複製・公開するサービスです。
ファイルをダウンロードできるかどうかは、MOD作者の指定したルールに従ってください。
XR2のマニュアル (XR Flight Operations Manual.pdf, page 6) には、以下のように書かれています。
You may not redistribute this software or host it on your own Website; however, you are free to link to my Web Page.
(翻訳)このソフトウェアを再配布したり、あなたのウェブサイト上で公開することは許可していません。しかし、わたしのウェブページへのリンクを貼るのは問題ありません。
2021-07-19
スタートレックの宇宙船で、ホバーエンジンを使用して降下する時、エンジン出力が高いので、降下速度が微調整できず、地表に激突してしまいます。
また、PursuitMFDでは大気の濃い惑星等には使えないようですが、他のMFDはないのでしょうか?
HoverMFDというMODをおすすめします。
自動着陸はできませんが、ホバーエンジンでの上昇・降下速度を任意の数字に設定できます。
HoverMFDのダウンロード
ダウンロードしたファイルを解凍して、中のファイル・フォルダをコピー。
Orbiterフォルダにペーストして上書きする。
LaunchpadでModulesタブを開く。
HoverMFDにチェックを入れる。
HoverMFDの操作
APをクリックするとオートパイロット開始。
初期状態ではVertical Speed(垂直速度)をゼロにする。
+or-をクリックして速度を変更する。
2021-08-03
STAR WARS等の宇宙船で地球表面に着陸した際に機体が転覆してしまいます。
Orbiter2010のMODをOrbiter2016で使用していませんか?
着陸関連の仕様が変更されたため、2010の宇宙船は2016では安定して着陸できません。
追記
Legacy Touchdown Pointsを導入すれば、古い世代のMODでも正常に着陸できます。
2021-08-25
質問をされる場合は、1コメントにつき1つまでにしていただくようお願いします。
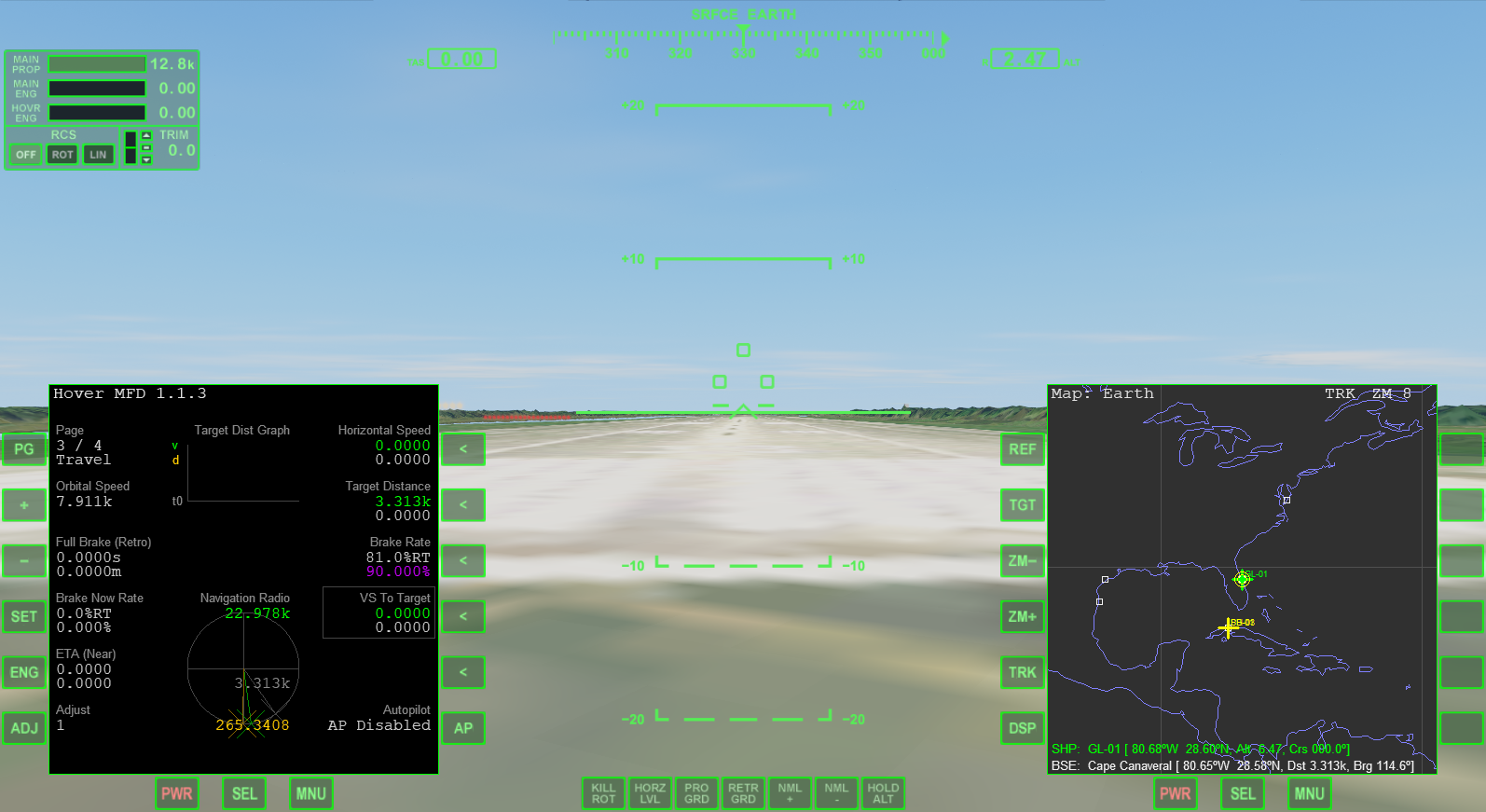
MAPMFD上のDstの値と、HoverMFD上のTarget Distanceの値が一致しないのは仕様でしょうか?
こちらの環境では問題を再現できませんでした。
以下の画像ではCape Canaveralをそれぞれターゲットに指定していますが、どちらも同じ数字が表示されています。
Map MFDでは小数の切り上げが行われるので、それによって見かけ上の数字に違いが生じることはあります。
地球上のある地点、例えばWikipedia等における富士山の最高点の緯度・経度の数値をHoverMFDに入力した上で、飛行プランを実行したところ、誤差が出るのはこれも仕様でしょうか?
緯度経度の値は10進法になっていますか?
Wikipediaでは経緯度を度分秒(60進法)で表記していますが、Orbiterでは主に10進法で入力・表示します。
Google Mapでは経緯度を10進表記してくれるので、そちらを利用することをおすすめします。
【みんなの知識 ちょっと便利帳】緯度・経度の、10進数と60進数(度分秒)の変換
任意に着陸したい地点に、VOR/ILS周波数を設置する方法をご教示お願い致します。
多忙につき、いつとは約束できませんが、新しく基地を設置する方法について解説する予定です。
着陸パッドとVORの設定などについても取り上げます。
2021-10-16
2016でTouchdown pointsを設定する方法は存在しますか?MODそのものを製作者が改変しない限り不可能ですか?
Orbiterでは、DLLファイルに宇宙船の細かい設定を記述するようになっています。
Modulesフォルダを開くと、機体ごとにDLLファイルが存在することが確認できます。
Touchdown pointsの設定もDLLファイルに記述します。
DLLファイルを作成するには最低限のプログラミングの知識が必要で、また作成されたDLLファイルは容易に改変できません。
新しく作成した機体にTouchdown pointsを設定することはできますが、既存の機体に追加できるのは作者だけです。
また、Spacecraft3、Spacecraft4を利用するMODの場合、異なる機体が同じDLLファイルを共有する仕組みになっています。
Spacecraft3、Spacecraft4のいずれも、Touchdown pointsの設定はOrbiter2010の仕様になっているので、DLLファイルを作者がアップデートしない限り2016に対応できません。
追記
Legacy Touchdown Pointsを導入すれば、古い世代のMODでも正常に着陸できます。
2021-12-26
ISSの設定の話なんですが、Orbiter2016のソースやコンフファイルを見てみたところ、massが450e3と書いてありました。
ネット上の情報によると正確に近い値は419.7e3となっているようです。
ちょっと疑問に思いました。
ISSについてですが、少なくともOrbiter2003から同じ3Dモデルを使い続けているようです。
当時まだISSは建造途中であり、この3Dモデルは完成予想図として作られたものです。
その後、ISSは計画を縮小され、いくつかのモジュールはキャンセルされたのですが、これらの変更はOrbiterに反映されていません。
このことが、現実のISSとの総重量の違いとなっていると考えられます。
2022-02-11
ISS for Orbiter 2016 はどのシナリオファイルで使えますか?
ISS A to Zと書かれたシナリオです。
2022-02-14-01
「JPL Horizonsから軌道をインポートする」
ですが、インポートして作成された.scnファイル上の座標がsunの場合でもearthの場合でもJPL HorizonsのデータからY軸とZ軸を入れ替えていますよね?
これはOrbiterではどの天体にしてもそのようなaxesの設定になっていると考えて良いんでしょうか?
JPL Horizonsが使用しているのは「Z軸が上の右手座標系」です。
Orbiterが使用しているのは「Y軸が上の左手座標系」です。
これら座標系における「上」とは、天の北極もしくは黄道北極のことを指します。
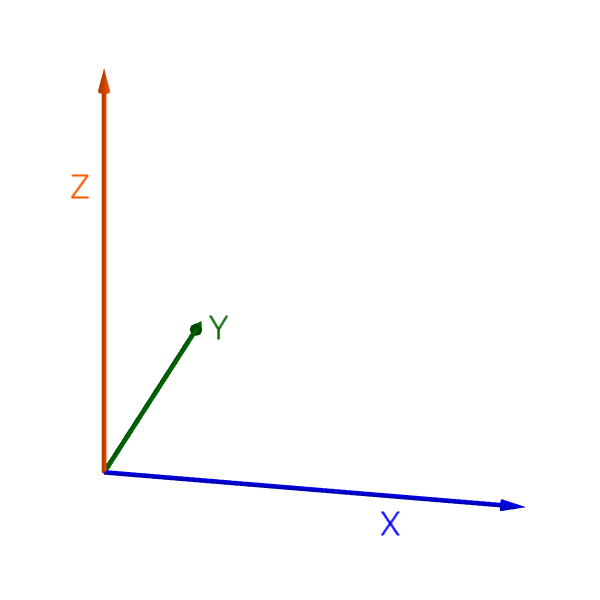
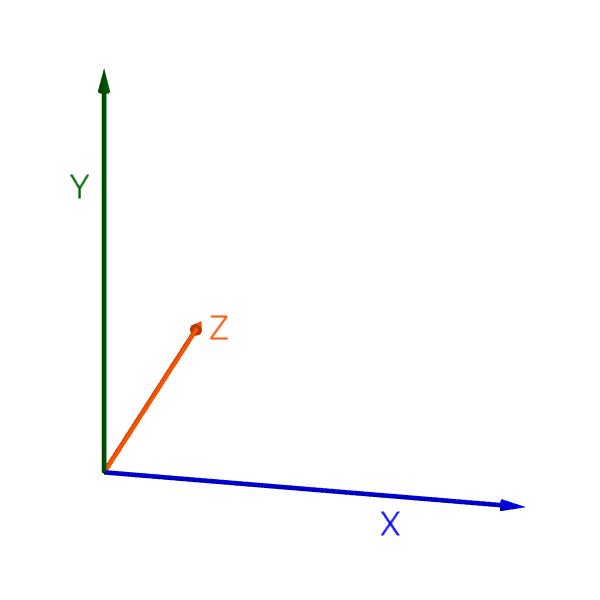
前者で表現された座標を後者で利用する場合は、Y軸とZ軸を入れ替えればよい、ということになります。
2022-02-14-02
「シナリオファイルの直接編集」についてですが、
BEGIN_SHIPS
から
END_SHIPS
までの記載内容について、特にRPOSのデータの仕様を教えてください。
.scnファイルの仕様について調べてみましたが、Orbiterの添付ファイルやネット上では見当たりませんでした。
.scnファイルの仕様については、DocフォルダにあるOrbiterConfig.pdfを参照してください。
Scenario filesの項目に詳しく書かれています。
RPOSは位置ベクトルです。上の2022-02-14-01の回答を参照してください。
シナリオファイルについての解説を更新しました。
シナリオファイルの直接編集
2022-02-15
NikogoriさんってMIT卒ですか?SpaceXの社員ですか?
違います。
2023-05-05
World of Oblivion 2014-04-26(https://www.orbiter-forum.com/resources/world-of-oblivion.2676/)をダウンロードして、orbiter2016へインストールして、起動を試みたところ、エラーが出て立ち上がりません。どうしてでしょうか?
お手数ですが、次回からは以下のページをご利用ください。
バグ・トラブルを報告する
このMODはUCGOが動作に必須なのですが、UCGOはOrbiter2016に対応していないため利用できません。
Orbiter2010にUCGOを導入して、その上からWorld of Oblivionをインストールしてください。
2023-12-27
Orbiterで使用可能な画面サイズを教えてください。
具体的には、4Kモニタで使用したら3840×2160で使用できるのか知りたいです。
バニラでは確認していませんが、D3D9Clientであれば4Kにも対応しています。
LaunchpadのVideoタブを開く。
Resolutionのドロップダウンメニューで画面解像度を選択できる。